

Linear quadratic differential game based four-wheel active steering control method for four-wheel independently-driven electric vehicle
A four-wheel independent drive, linear quadratic type technology, applied in automatic steering control components, electric vehicles, control drives, etc., can solve the problems of steering sensitivity, driver's driving feeling changes, and inadaptability to four-wheel steering systems, etc., to achieve improved The effects of handling stability, improving active safety performance, and reducing the side slip angle of the car's center of mass
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
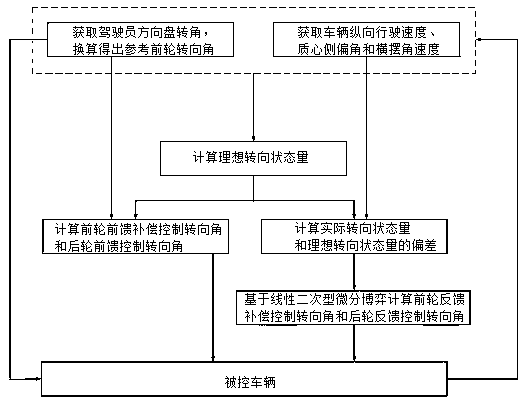
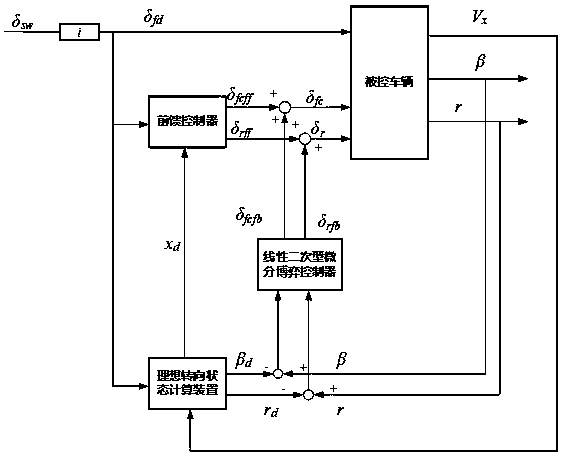
[0024] Such as Figure 1-Figure 2 As shown, a four-wheel active steering control method for a four-wheel independently driven electric vehicle based on a linear quadratic differential game of the present invention comprises the following steps:
[0025] Step 1: Obtain the steering wheel angle of the driver through the steering wheel angle sensor, convert the reference front wheel steering angle through the given steering transmission ratio i, input the reference front wheel steering angle into the vehicle's front wheel steering controller, and reflect the driver's turn intention;
[0026] The second step: Obtain the real-time longitudinal driving speed of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More