Filtering model real-time correction method and system for integrated positioning
A combined positioning and real-time correction technology, applied in the field of navigation, can solve problems such as difficulty in balancing the deviation of dynamic models and observation models, inaccurate prior knowledge, and large computational burden for high-dimensional systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
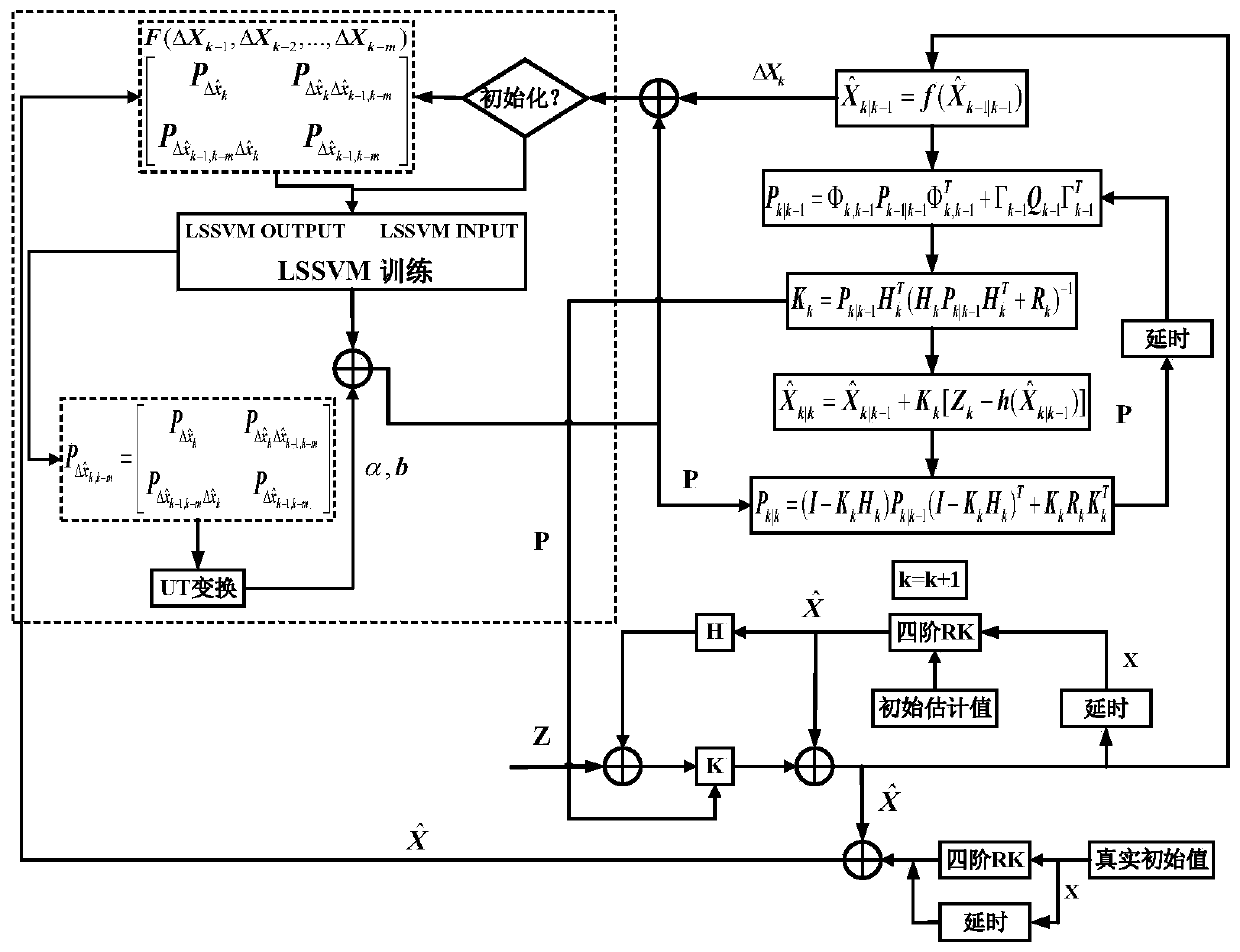
[0106] The method for real-time correction of the filter model in combined positioning provided by the embodiment of the present invention includes:
[0107] Step (1), extended Kalman filter:
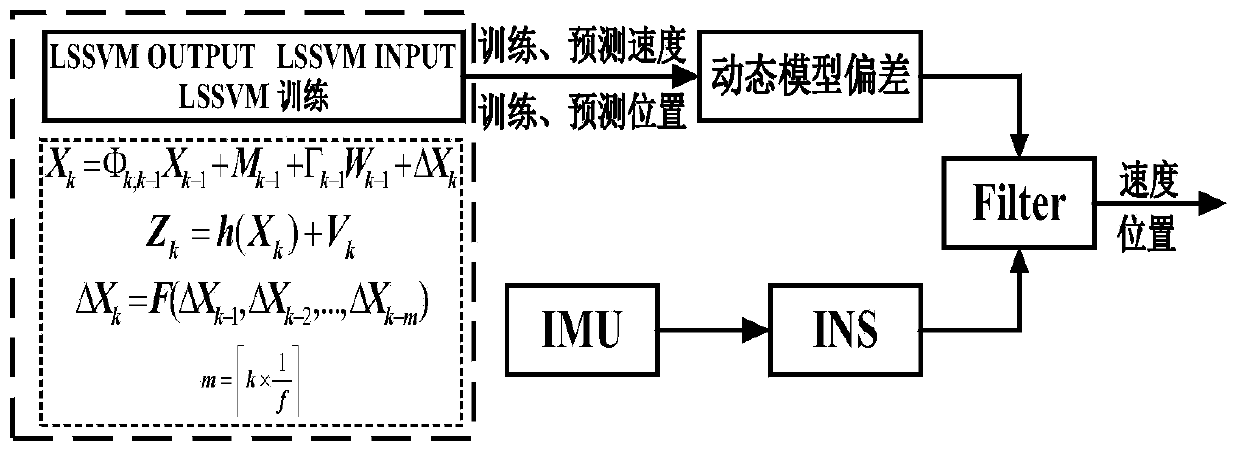
[0108] Obtain data for a stochastic system of interest and construct a nonlinear model:
[0109] x k =f(X k-1 )+Γ k-1 W K-1 (1)
[0110] Z k =h(X k )+V k (2)
[0111] In the above formula, X k ∈ R n is the state variable at time k, Z k ∈ R nis the measured variable at time k; W is the process noise of zero-mean normal distribution with variance Q, and V is also V k ~N(0,R k ) observation noise; f() and h() are two nonlinear functions;
[0112] The linearized and simplified models of equations (1) and (2) are as follows:
[0113] x k = Φ k,k-1 x k-1 +M k-1 +Γ k-1 W k-1 (3)
[0114] Z k =H k x k +N k +V k (4)
[0115] The general EKF algorithm is implemented recursively in the following set of fundamental equations:
[0116] (a) State one-step prediction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More