Method and system for real-time correction of filtering model in combined positioning
A real-time correction and combined positioning technology, applied in the field of navigation, can solve the problems of high-dimensional system, large calculation burden, inaccurate prior knowledge, and difficulty in balancing dynamic model and observation model deviation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
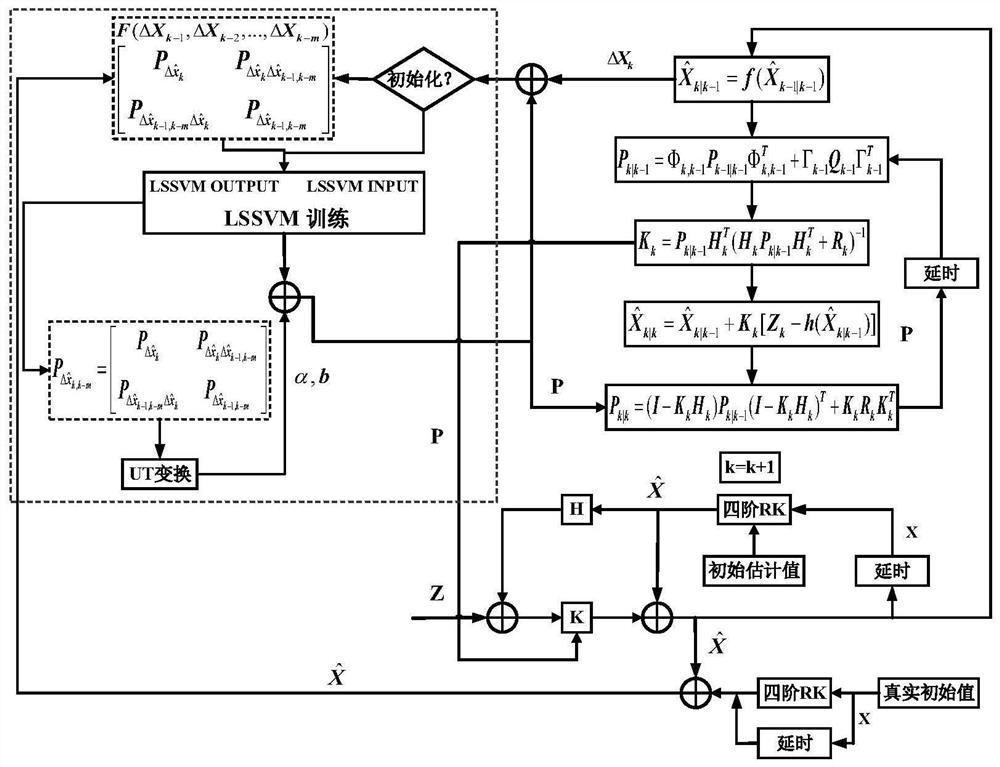
[0106] The method for real-time correction of the filter model in combined positioning provided by the embodiment of the present invention includes:
[0107] Step (1), extended Kalman filter:
[0108] Obtain data for a stochastic system of interest and construct a nonlinear model:
[0109] x k =f(X k-1 )+Γ k-1 W K-1 (1)
[0110] Z k =h(X k )+V k (2)
[0111] In the above formula, X k ∈ R n is the state variable at time k, Z k ∈ R nis the measured variable at time k; W is the process noise of zero-mean normal distribution with variance Q, and V is also V k ~N(0,R k ) observation noise; f() and h() are two nonlinear functions;
[0112] The linearized and simplified models of equations (1) and (2) are as follows:
[0113] x k = Φ k,k-1 x k-1 +M k-1 +Γ k-1 W k-1 (3)
[0114] Z k =H k x k +N k +V k (4)
[0115] The general EKF algorithm is implemented recursively in the following set of fundamental equations:
[0116] (a) State one-step prediction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More