

self-adaptive fault-tolerant cubature Kalman filtering method applied to target tracking
A Kalman filter and target tracking technology, applied in the field of target tracking, can solve the problems of reduced filtering accuracy and affecting adaptive filter estimation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
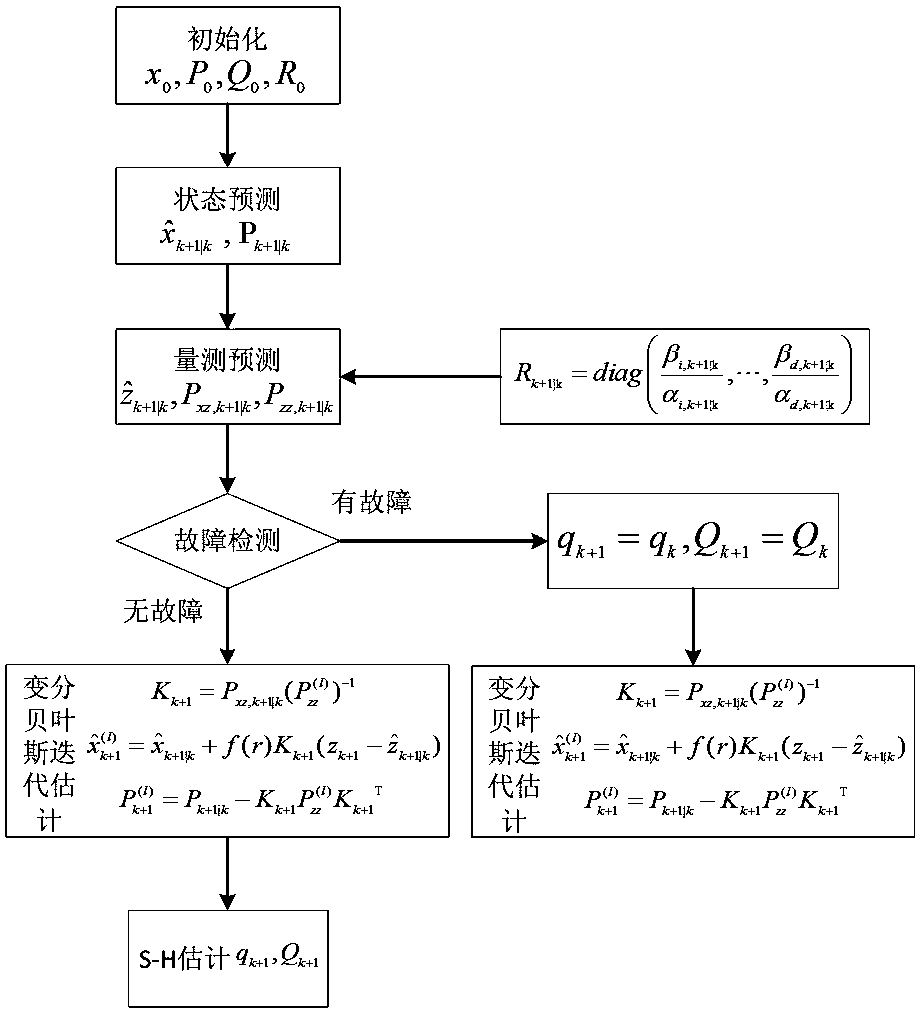
[0071] The present invention proposes an adaptive fault-tolerant volumetric Kalman filter method applied to target tracking. Firstly, a system model is established according to the motion state of the actual target tracking. Secondly, the steps of the adaptive fault-tolerant volumetric Kalman filter method are given. Finally, slowly changing faults are introduced. detection algorithm, its flow chart is as follows figure 1 shown, including the following steps:
[0072] Step 1: System modeling, considering the discrete-time nonlinear system model, the state equation and measurement equation of the tracking target are as follows:
[0073]
[0074] Where: x k+1 ∈ R n is the system state vector at time k+1, which is composed of displacement and velocity in the x direction and displacement and velocity in the y direction, f and h are known functions, z k+1 ∈ R m is the measurement vector of the system at time k+1, which is composed of the target movement distance and angle me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More