

A system and method for generating a UAV autonomous tracking path model
A technology for generating systems and drones, applied in three-dimensional position/channel control, etc., can solve problems such as high risk, increased safety hazards, and tediousness, and achieve the effects of strong anti-interference ability, guaranteed consistency, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
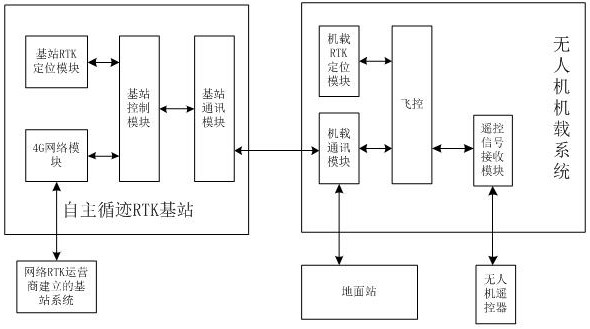
[0045] Such as figure 1 As shown, a generation system of UAV autonomous tracking path model, including:
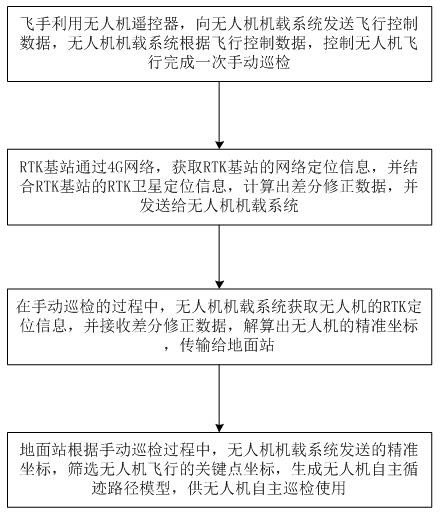
[0046] The UAV remote control is used for the pilot to remotely control the UAV, generate control data and transmit it to the UAV airborne system;
[0047] The RTK base station is used to obtain the network positioning information of the network RTK base station group through the 4G network, combine it with the RTK satellite positioning information of the RTK base station, calculate the positioning calibration data of the UAV, and transmit it to the UAV airborne system;
[0048] The UAV airborne system controls the flight of the UAV according to the data from the UAV remote control, combines the RTK satellite positioning information of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More