Multi-rotor unmanned aerial vehicle intelligent inspection system
A multi-rotor unmanned aerial vehicle, intelligent inspection technology, applied in radio wave measurement systems, satellite radio beacon positioning systems, closed-circuit television systems, etc. The effect of inspection, labor reduction, and reflection time reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
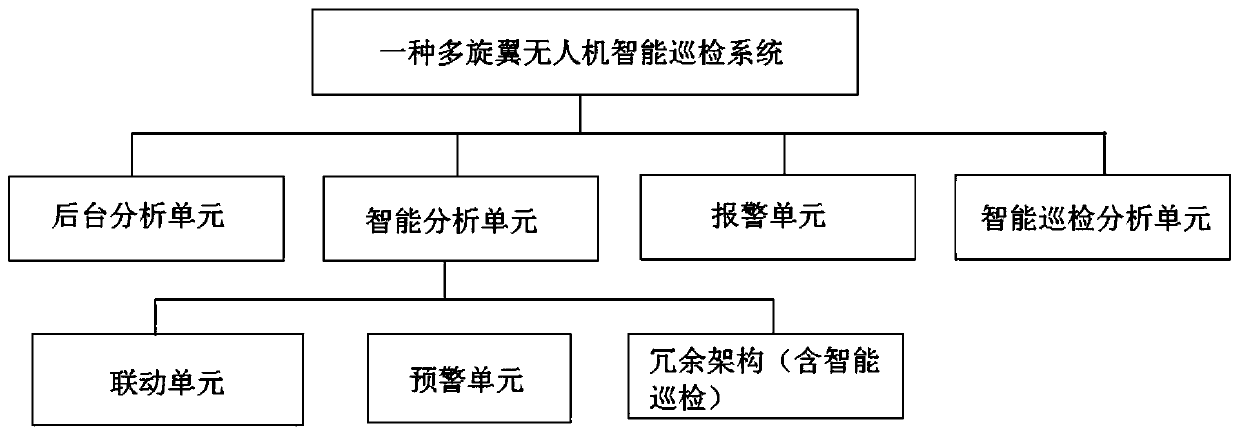
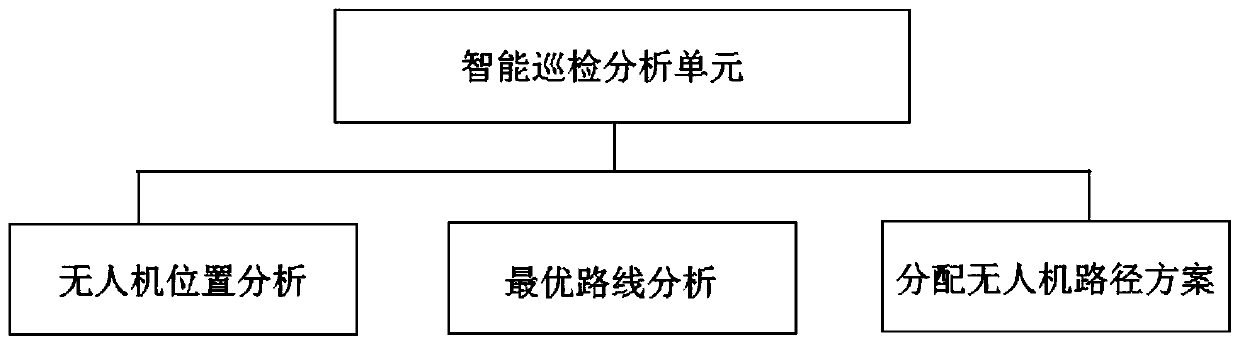
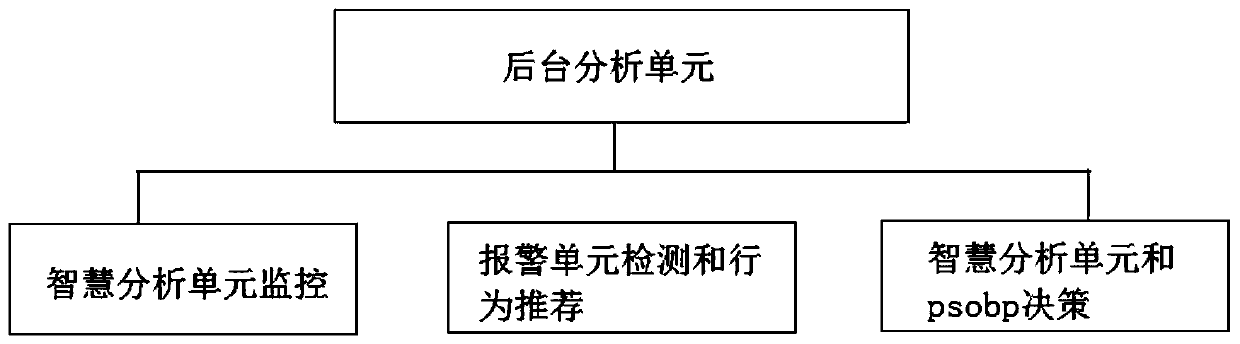
[0017] like figure 1 As shown, a multi-rotor UAV intelligent inspection system includes an inspection UAV. The main body of the inspection UAV is equipped with a background analysis unit, an intelligent analysis unit, an alarm unit and an intelligent inspection analysis unit. The background analysis unit is used to make auxiliary judgments for the inspection system, perform fuzzy analysis to judge suspicious targets, and then send out signals. The intelligent analysis unit is used to receive the signal from the background analysis unit, detect suspicious targets, take pictures of suspicious targets and transmit the images. The intelligent inspection analysis unit is used to receive the image t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More