

Unmanned aerial vehicle scene matching and positioning method based on improved ORB feature point matching
A feature point matching and scene matching technology, applied in the field of visual navigation, can solve the problems of ORB algorithm not having scale invariance and decreasing matching accuracy rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the drawings and embodiments. The present invention includes but is not limited to the following embodiments.
[0016] The present invention is an autonomous positioning method for UAV scenes based on improved ORB (Oriented FAST and Rotated BRIEF) feature point matching. The UAV is positioned by acquiring real-time images of the environment and matching high-precision map libraries. Various low-altitude flight platforms such as aircraft provide navigation and positioning parameters.
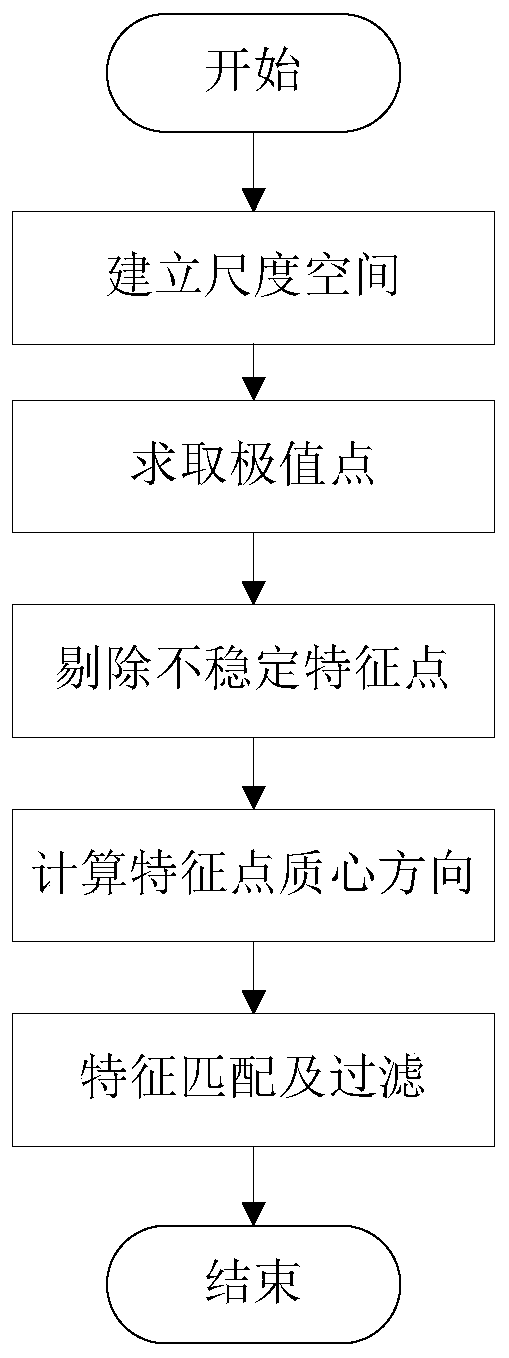
[0017] The present invention includes the following steps:
[0018] (1) Establish the scale space and find the extreme points: define the scale of the image as a function F(x,y), x is the horizontal axis of the image pixel coordinate, and y is the vertical axis of the image pixel coordinate, which is convolved with the Gaussian function Obtain the scale space, and use the local extreme points of the scale space as candidat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More