

Sensitive soft actuator and application thereof
A technology of actuators and software, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as slow response speed, and achieve the effects of sensitive response, diversified movement modes, and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0054] Example 1 Sensitive soft actuator
[0055] (1) Structural analysis
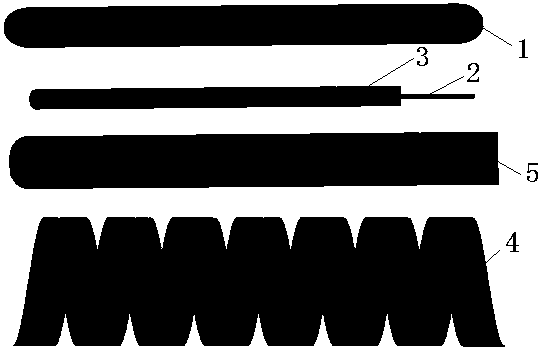
[0056] As shown in the figure, the sensitive soft actuator of this embodiment is in the shape of a sheet as a whole, and its structure is as follows figure 1 shown. figure 2 A schematic diagram of the components of the sensitive soft actuator is given; figure 2 Among them, from top to bottom are the flexible alloy layer, the driving component, the protective layer, and the elastic limiting layer.
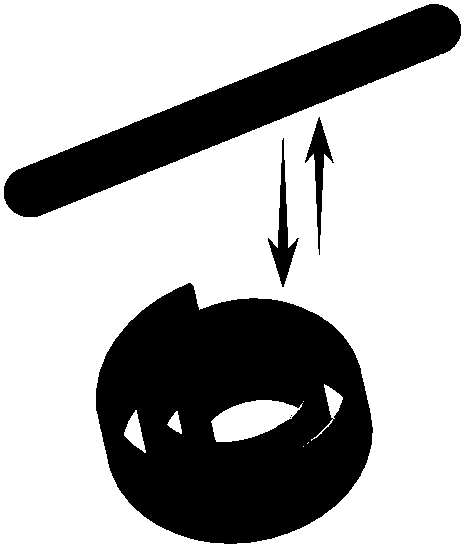
[0057] The sensitive soft actuator in this embodiment includes a flexible alloy layer, a driving component, and an elastic limiting layer. Among them, the flexible alloy layer is in the shape of a thin sheet, and the flexible alloy layer has two initial forms: straight line form and curl form, such as image 3 shown. More specifically, the flexible alloy layer is made of a metal material, and the flexible alloy layer is in the shape of a strip, and the flexible alloy layer is arranged symmetrically al...
Embodiment 2
[0076] Embodiment 2 bionic hand
[0077] The traditional soft bionic hand has disadvantages such as slow response speed, sluggish movement and insufficient driving force. For this reason, based on the rapid curling characteristics of the soft actuator and the good fit of the sheet structure, the inventors realized the sensitive control of the soft bionic hand.
[0078] In order to eliminate the interference of human factors, the experiment is more authentic. The inventor made a human prosthesis through 3D printing technology for the control experiment of the bionic hand. In order to achieve the best test results, the specific shape and size of the prosthetic exactly modeled on the experimenter's arm.
[0079] The bionic hand of this embodiment includes an arm, a palm main body connected to the arm, prosthetic fingers movably connected to the palm main body, and the sensitive soft actuator in the aforementioned embodiment 1. In this embodiment, the prosthetic fingers are con...
Embodiment 3
[0084] Example 3 mechanical skin
[0085] In this example, the inventors combined sensitive soft actuators with soft materials to design a wearable soft mechanical skin.
[0086] The mechanical skin of this embodiment includes a soft surface layer and the aforementioned sensitive soft actuator, the sensitive soft actuator is connected to the soft surface layer, the soft surface layer is made of soft material, and the middle part of the sensitive soft actuator is connected to the soft surface layer through a fixing piece. As shown in the figure, the mechanical skin of this embodiment is equipped with a plurality of sensitive soft actuators. When subjected to external force, the sensitive soft actuators will deform to realize corresponding operations such as wrapping.
[0087] After measurement, the working pressure of the soft mechanical skin in this implementation is 150kPa. Taking the average value of 10 measurements, the response time of the soft mechanical skin is only 0.3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More