

Automatic driving vehicle lane change control method and device
A technology for lane changing and automatic driving, applied in the field of lane changing control methods and devices for automatic driving vehicles, capable of solving problems such as low safety of obstacles, unsafety, and high misjudgment of lane changing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
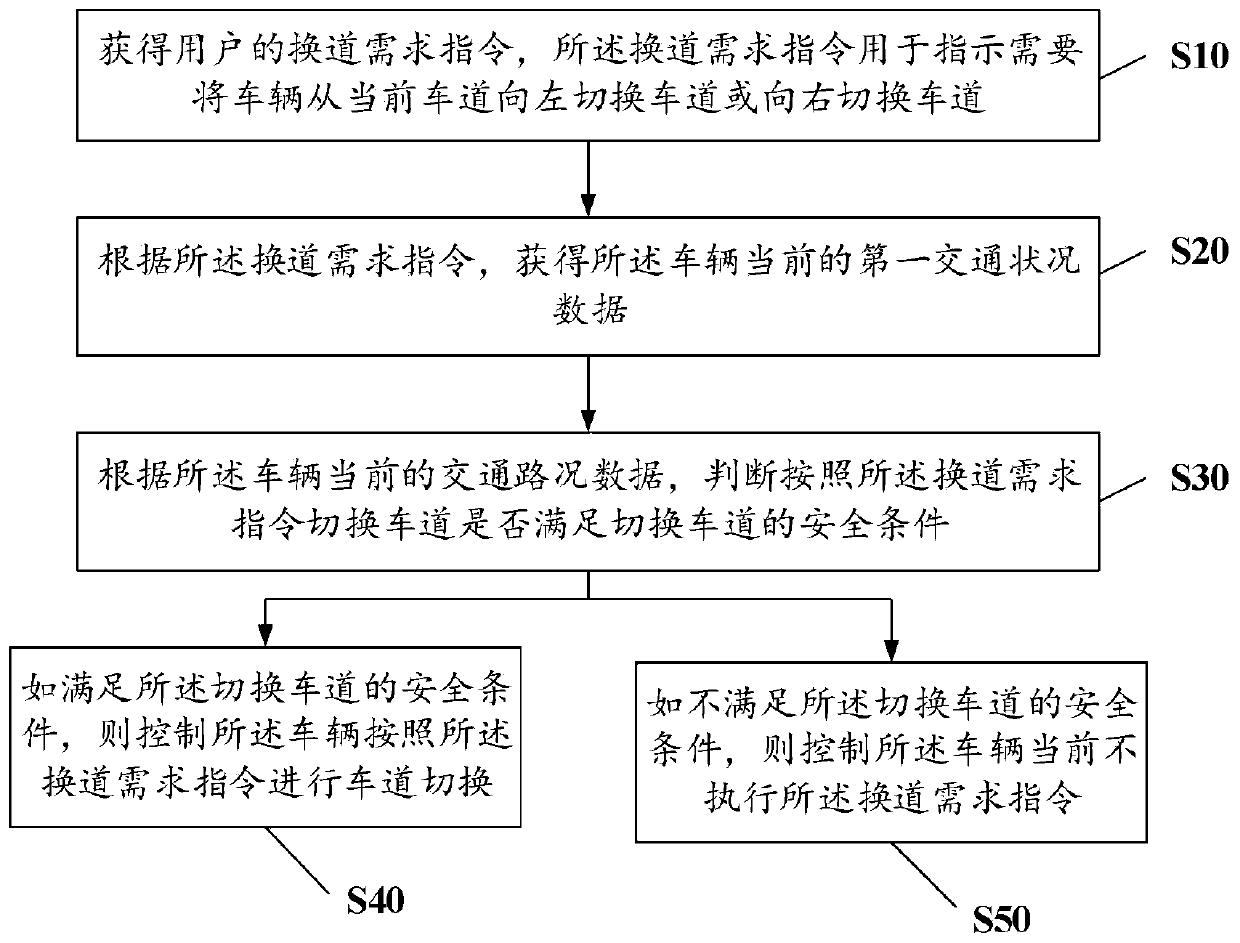
[0071] (1) Taking the left lane, the lane and the right lane of the autonomous vehicle as the lanes to be decided, on the determined navigation route, according to the position of the autonomous vehicle, at this moment, collect the information that can continue on each lane to be decided. The driving distance and speed limit information, quantify the information of each lane to be decided, and obtain the evaluation information of each lane to be decided;
[0072] (2) Collect the obstacle information on the front and rear sides of each lane to be decided relative to the longitudinal distance of the automatic driving vehicle, collect the current position and speed information of the two obstacles before and after, and the position information after a set period of time, And calculate the relative distances of the two obstacles before and after the current moment and the set time to the self-driving vehicle, and obtain information on the four relative distances of each lane to be ...
example 1
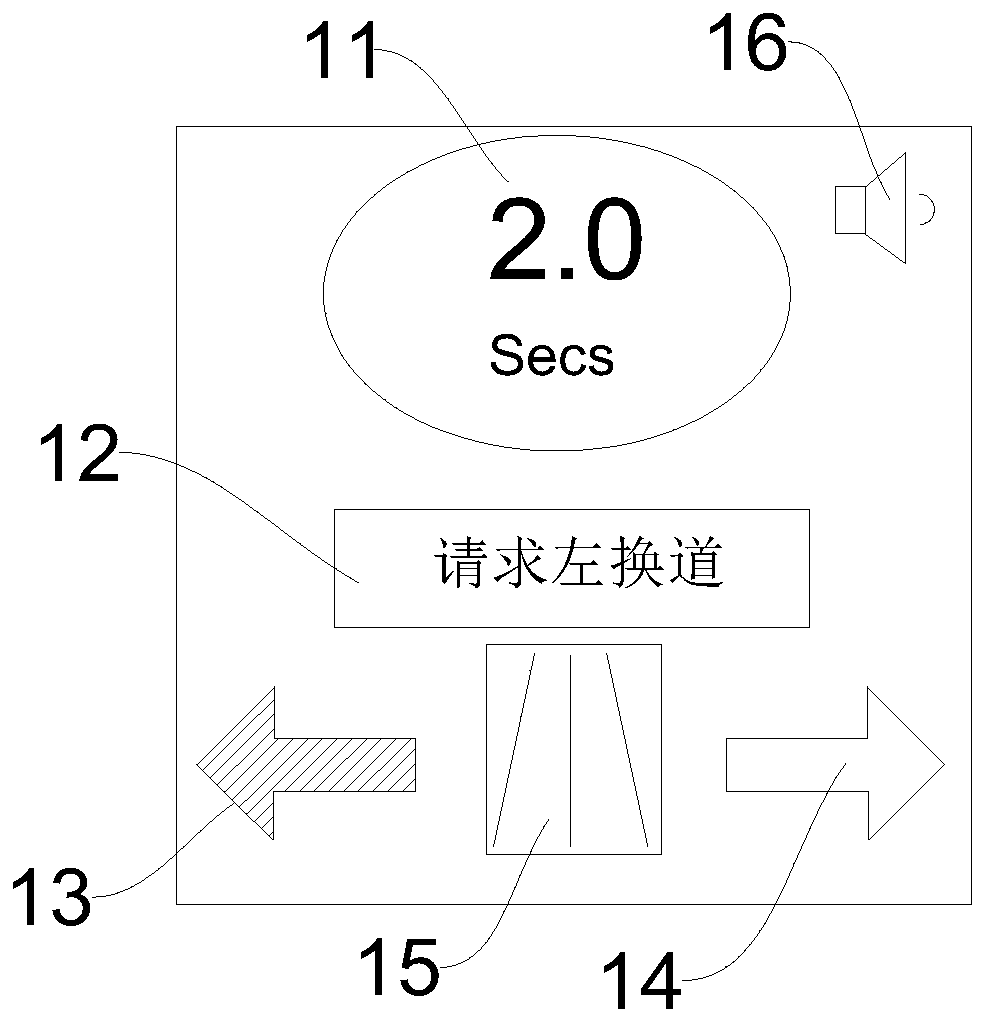
[0109] see image 3 , the human-computer interaction interface may include:
[0110] The first display panel 11 can be used to display the response waiting time in countdown mode.
[0111] The second display panel 12 can display the text of the initial decision result.
[0112] To the "left" lane change button 13, when the driver / passenger needs to perform manual intervention, the first change to the "left" lane can be sent to the corresponding system (such as the lane change decision system) on the vehicle through this button. Lane demand command; without manual intervention, the waiting confirmation stage of generating lane change request information (during the human-vehicle interaction operation in the first period), if requesting to change lane 13 to the "left", the button will pass through "flickering" ” effect to highlight the content of the request, and the driver / passenger can click the button to send a “confirmation” message, indicating that they agree with the ini...
example 2
[0118] To realize human-vehicle interactive operation or manual intervention, the keys and information required for the interactive mechanism can be integrated with the combination switch of the steering wheel and turn signal based on the existing automotive components, which will help the driver / passenger maintain better vigilance and timely Pay attention to the prompt information.
[0119] see Figure 4 , can be set on the steering wheel 101, the left button 102, the right button 103 and the straight button 104 can integrate the function of lane change selection or manual intervention in the turn signal combination switch 105;
[0120] Specifically, the left key 102 is mainly used for feeding back the second lane change demand instruction for "left" lane change, sending the first lane change demand instruction for "left" lane change, and displaying the lane change process. If a lane change to the "left" is requested, the button will highlight the request content through a "...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More