

Design of collimation servo controller based on nonlinear PID control technology
A servo controller and control technology technology, applied in the field of servo control, can solve the problems of unreasonable linear combination of errors, contradiction between rapidity and overshoot, etc., to reduce steady-state errors, enhance disturbance isolation performance, and suppress torque fluctuations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further elaborated below in conjunction with the accompanying drawings.
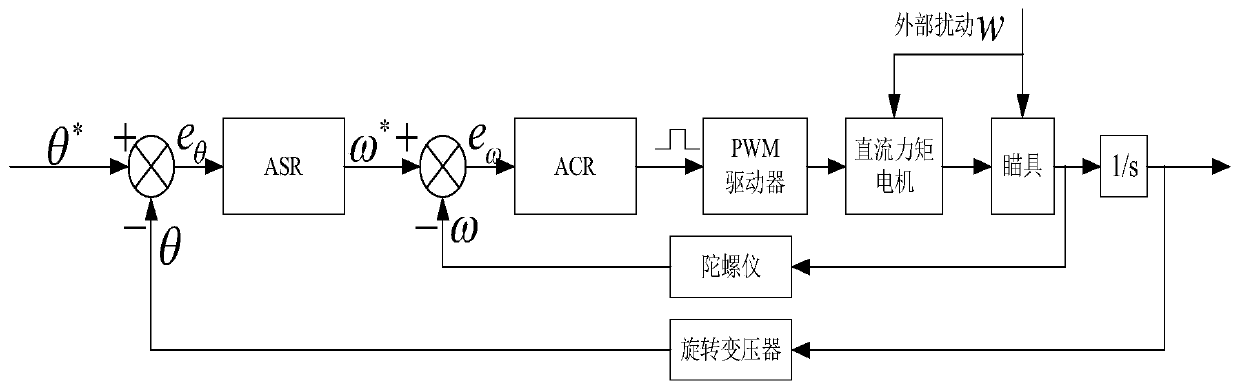
[0025] 1. The stabilized aiming servo system involved in the present invention is a new type of inner and outer frame stabilized aiming servo system whose axis systems are perpendicular to each other. It consists of two subsystems, the azimuth frame and the pitch frame, which are independent and cooperate with each other. The two subsystems have the same structure and are composed of loads, sensors, actuators, power amplifiers and other devices. The load is an aiming device fixedly installed on the carrier, the sensor mainly includes a gyroscope for measuring the angular rate of the carrier and a resolver for measuring the rotation angle of the carrier, the actuator is a DC torque motor, and the power amplifier is a PWM driver. The control structure of the aiming servo system involved in the present invention is as follows: figure 1 shown.
[0026] 2. In the stabili...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More