Neural network integral sliding mode control method for electro-hydraulic power-assisted steering system
A power steering, neural network technology, applied in the field of neural network integral sliding mode control of electro-hydraulic power steering system, can solve problems such as restricting control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] In order to make the features and advantages of this patent more obvious and easy to understand, the following specific examples are given together with the accompanying drawings and described in detail as follows:
[0106] In this embodiment, the following parameters are taken in the simulation system to model the electro-hydraulic power steering system:
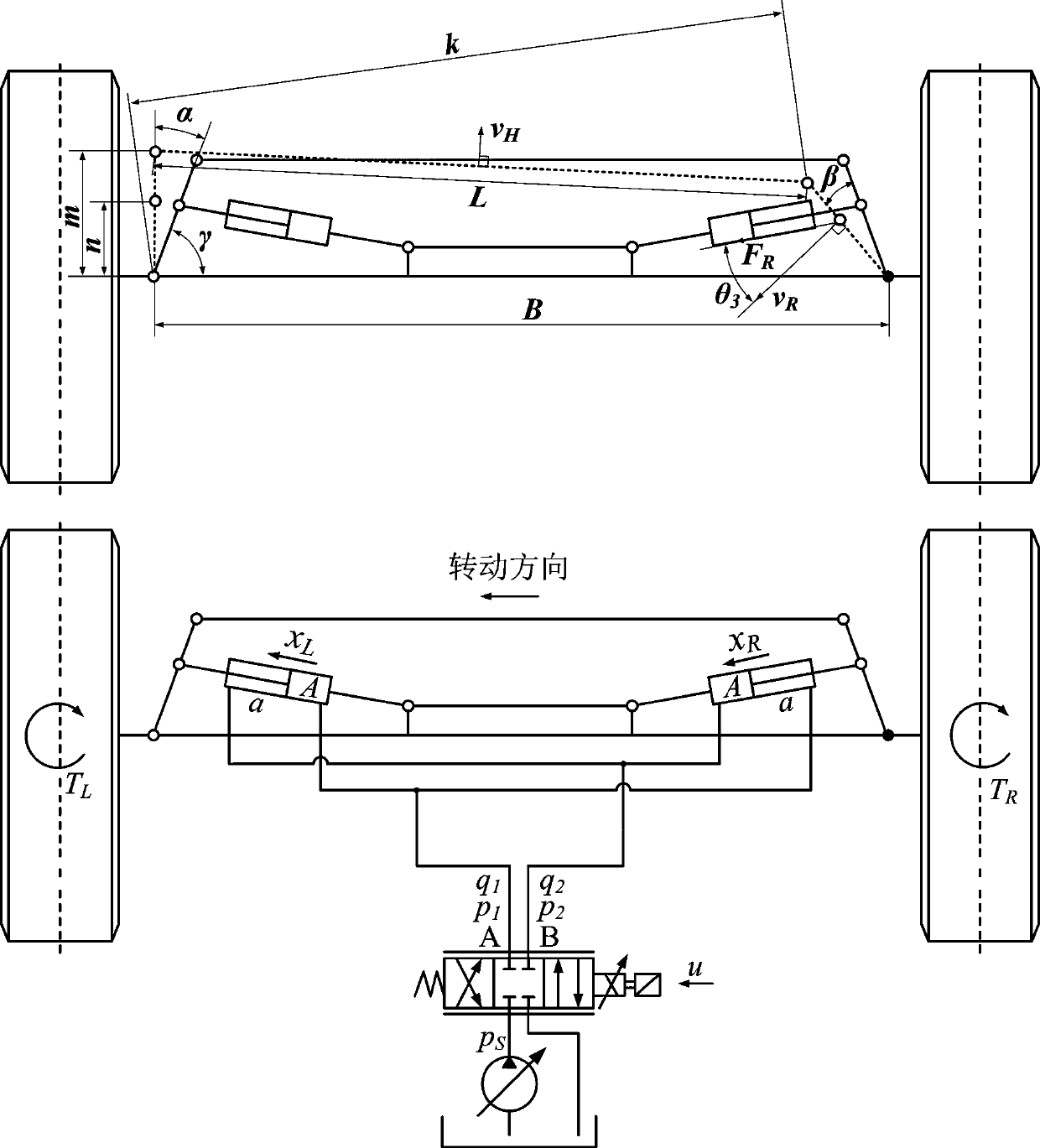
[0107] Such as figure 1 , figure 2 As shown, in the electro-hydraulic power steering system, the length of the steering knuckle arm is m=0.36m, the distance between the steering cylinder action point and the kingpin is n=0.21m, the distance between the two kingpins of the single shaft is B=2.0596m, and the tie rod The length L=1.8854m, the angle between the steering arm and the axle beam γ=76°, the equivalent moments of inertia J of the left and right tires and their auxiliary structures L =J R =143.1kg·m 2 , the equivalent damping coefficient C of the left and right tires and other structures L =C R =4×10 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



