

Tool center point calibration method and system for robot vision tool
A robot vision, tool center point technology, applied in instruments, measuring devices, optical devices, etc., can solve problems such as deviation operation and cumbersomeness, and achieve the effect of eliminating differences in technological maturity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] It should be noted that, in the case of no conflict, the embodiments and features in the embodiments of the present invention can be combined with each other.
[0040] The present invention will be described in detail below with reference to the drawings and in combination with embodiments.
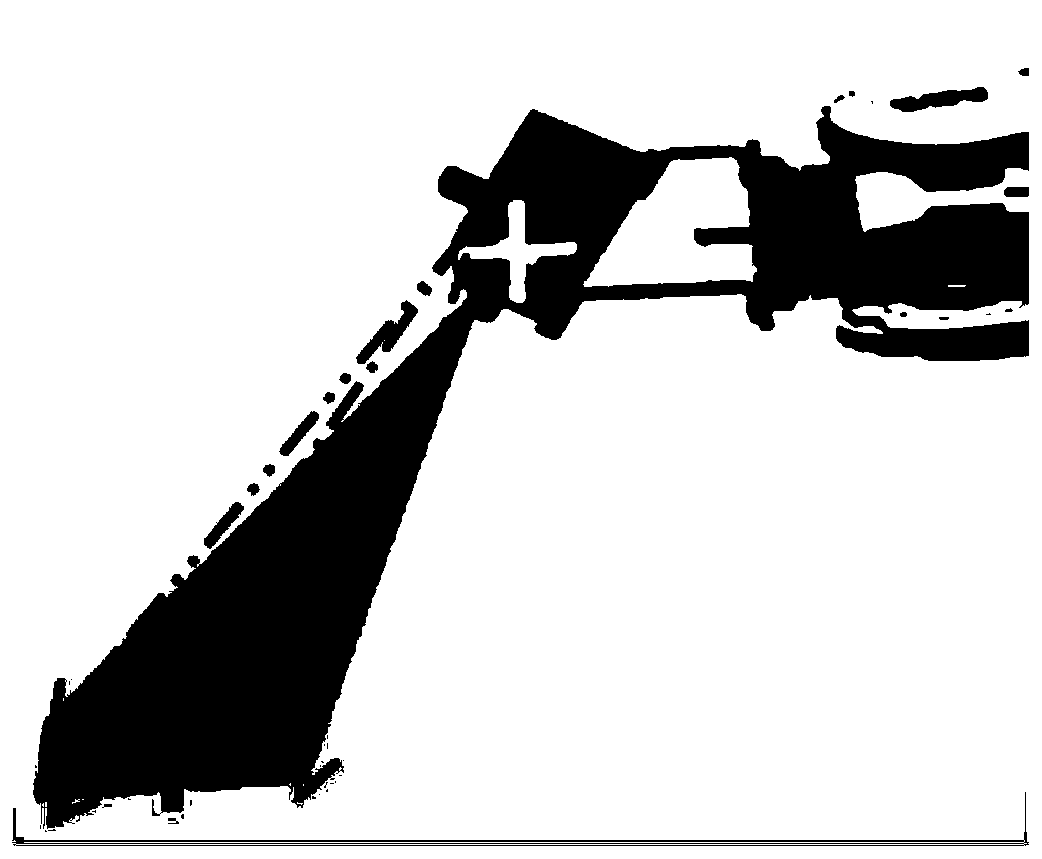
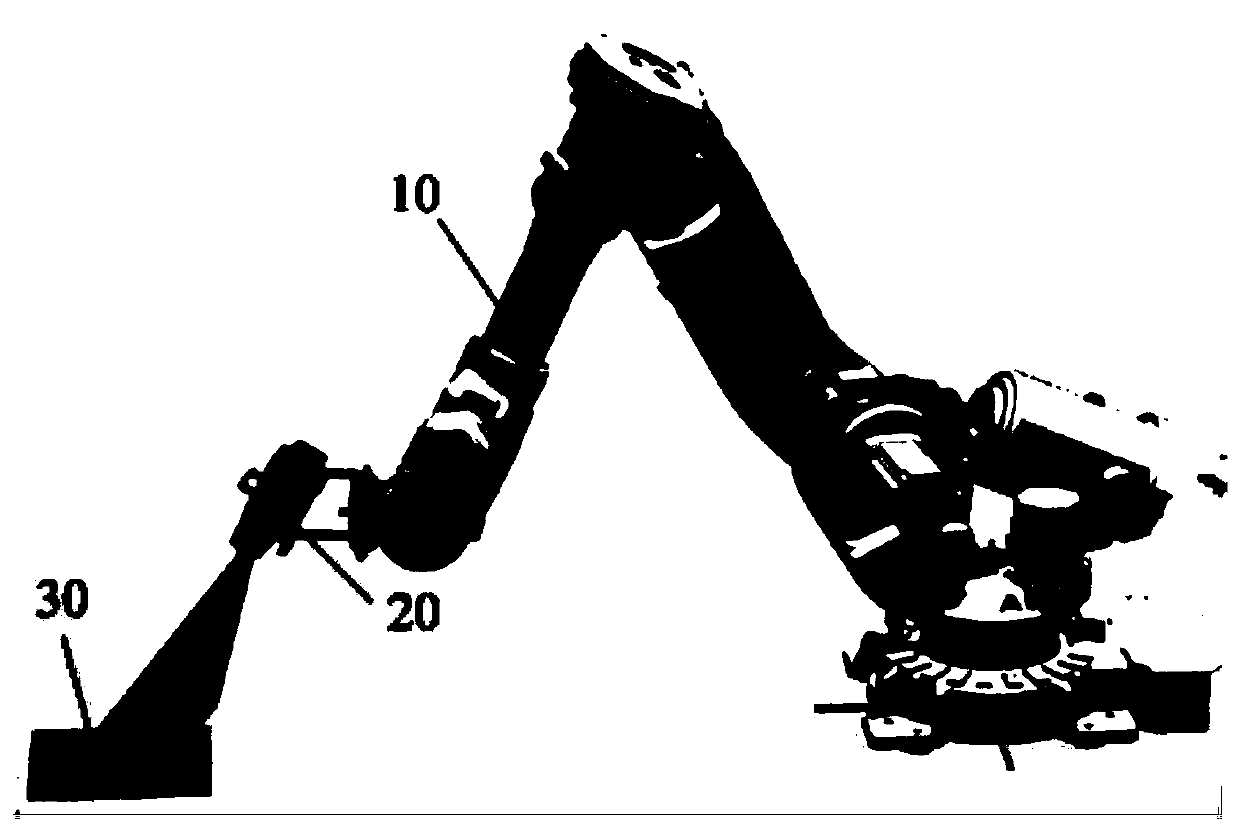
[0041] Such as image 3 As shown, an exemplary architecture of the tool center point TCP calibration method of a robot vision tool applying an embodiment of the present invention, wherein the robot (or mechanical arm) 10 is equipped with a vision system 20, and through the vision system 20, the robot can Image acquisition of the target object to manipulate the target object; and it can also be a partial reference figure 1 An example of an application where the vision system could be a robotic vision tool mounted on a flange at one end of a robotic arm. However, in order to ensure the accuracy and reliability of robot operation, it is necessary to calibrate the tool center point bef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More