

Self-locking rigid-soft coupling mechanical gripper
A mechanical gripper and self-locking technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of insufficient rigidity, limited grasping capacity and carrying capacity, poor stability, etc., to ensure flexibility and softness, and improve load capacity and stability, saving energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
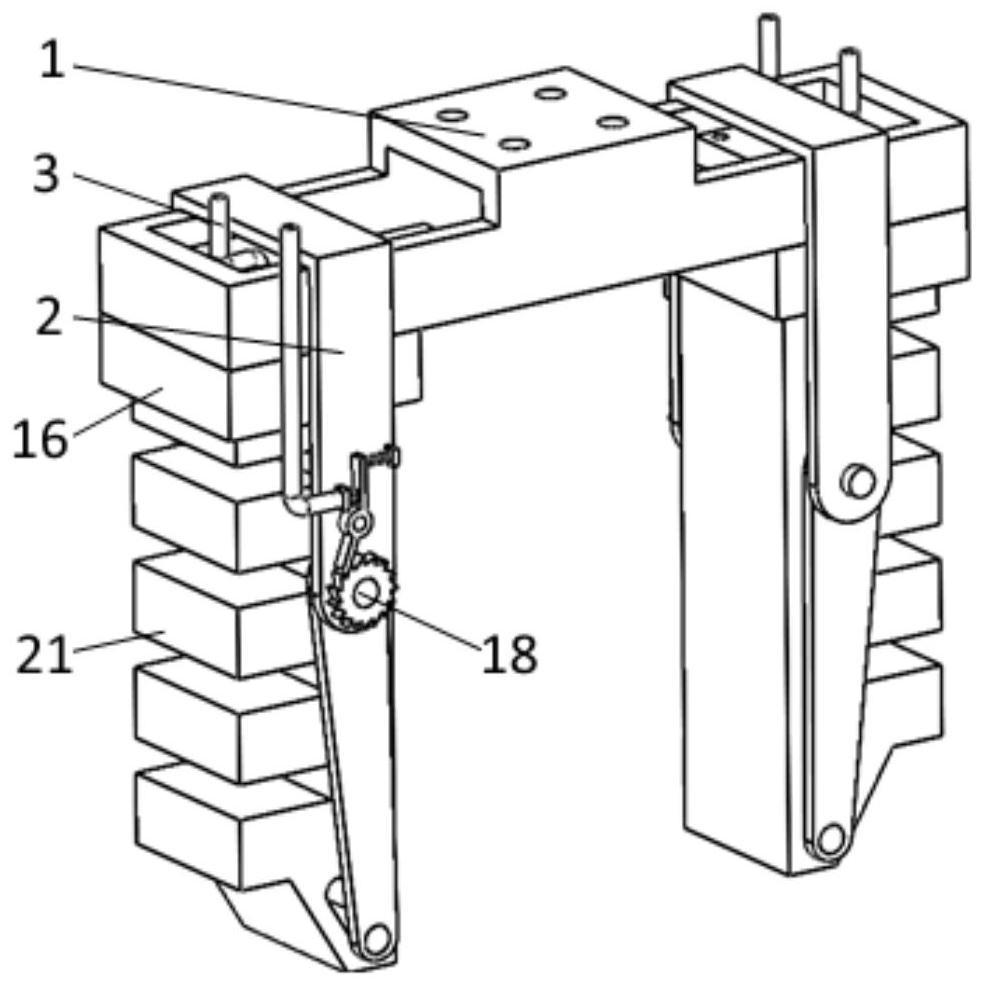
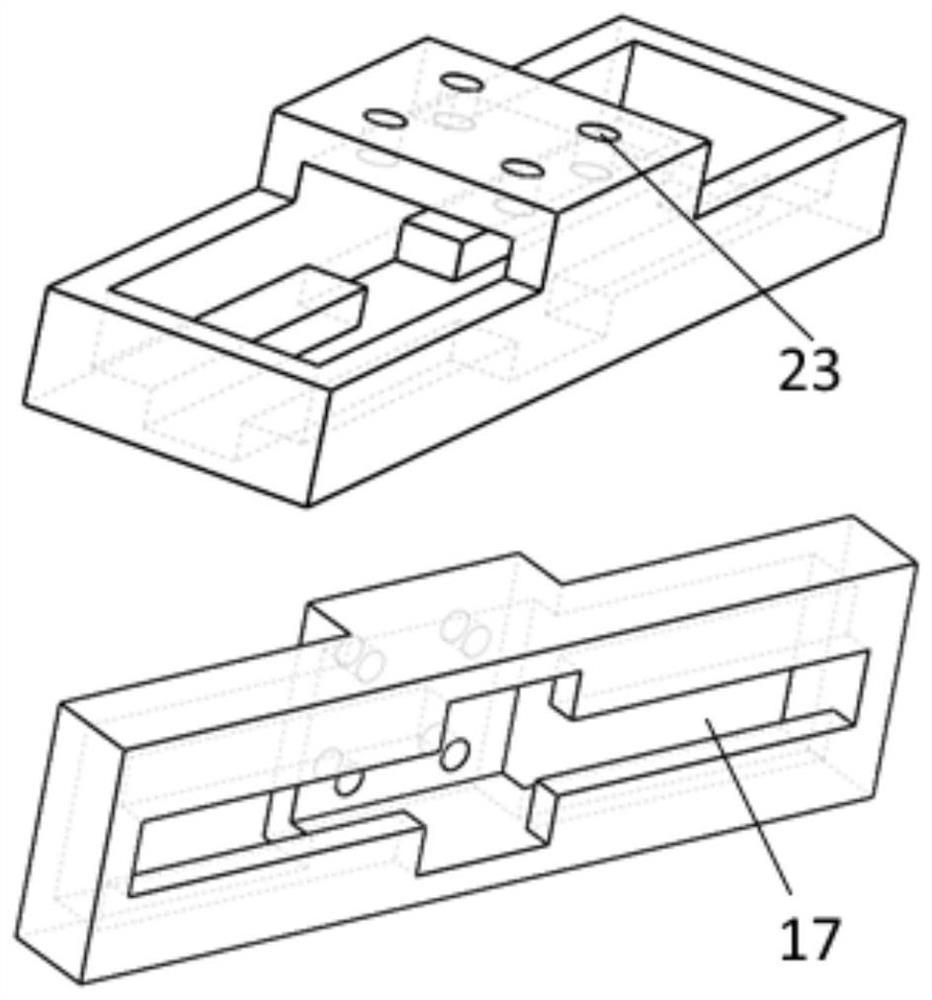
[0021] Such as figure 1 As shown, it is a self-locking rigid-soft coupling mechanical gripper related to this embodiment, which includes: an adjustable mounting base 1 and two sets of self-locking exoskeletons 2 arranged symmetrically at both ends of the adjustable mounting base 1, fingers Assembly 16, wherein: the finger assembly 16 is arranged under the adjustable mount 1, the self-locking exoskeleton 2 is arranged on the finger assembly 16 and the adjustable mount 1 and the finger assembly 16 are connected as a whole.
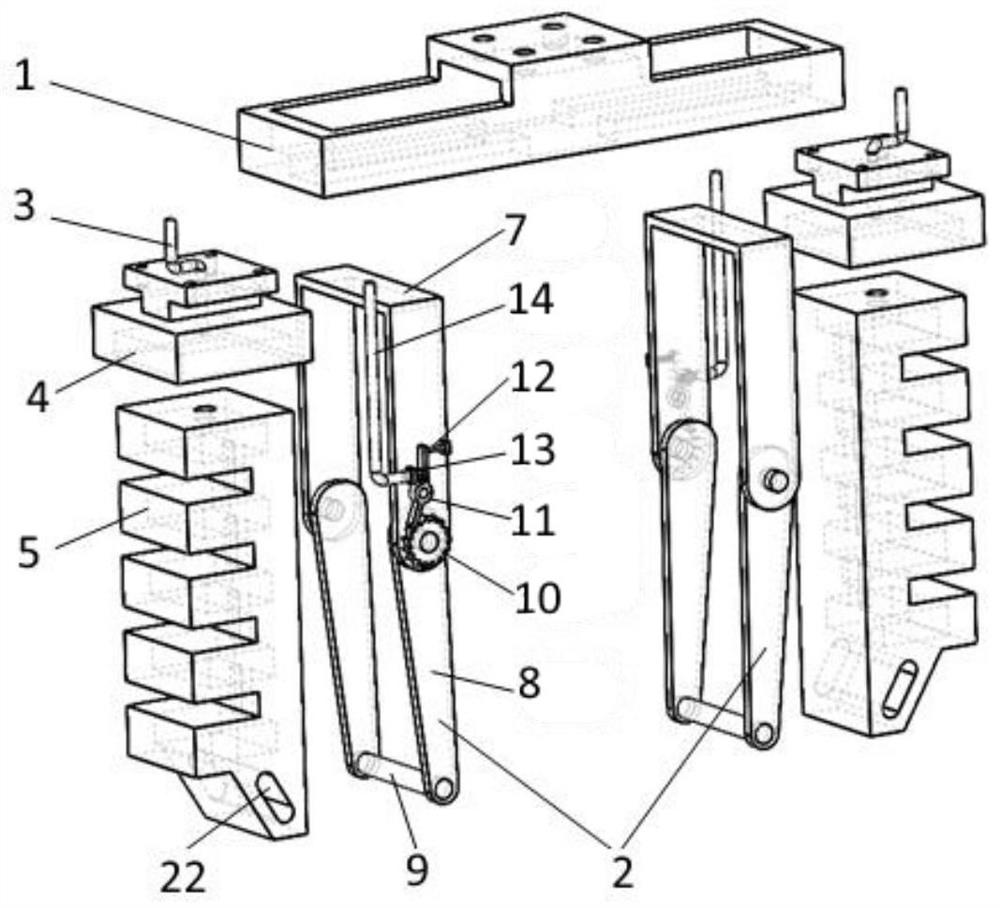
[0022] The self-locking exoskeleton 2 includes: a fixed upper frame 7, a movable lower limb 8, a pin rod 9 and a self-locking mechanism 18, wherein: the fixed upper frame 7 is arranged on the adjustable mounting base 1 and the finger assembly 16, and the movable lower limb 8 One end is movably connected to the fixed upper frame 7 through a rotating shaft 19 , and the other end is connected to the finger assembly 16 through a pin rod 9 .
[0023] The self-lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More