

Wearable hand mechanical exoskeleton with auxiliary grasping and rehabilitation training functions
A rehabilitation training and wearable technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of expensive rehabilitation medical equipment and scarcity of rehabilitation facilities, and achieve the effect of simple structure, low cost and high transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
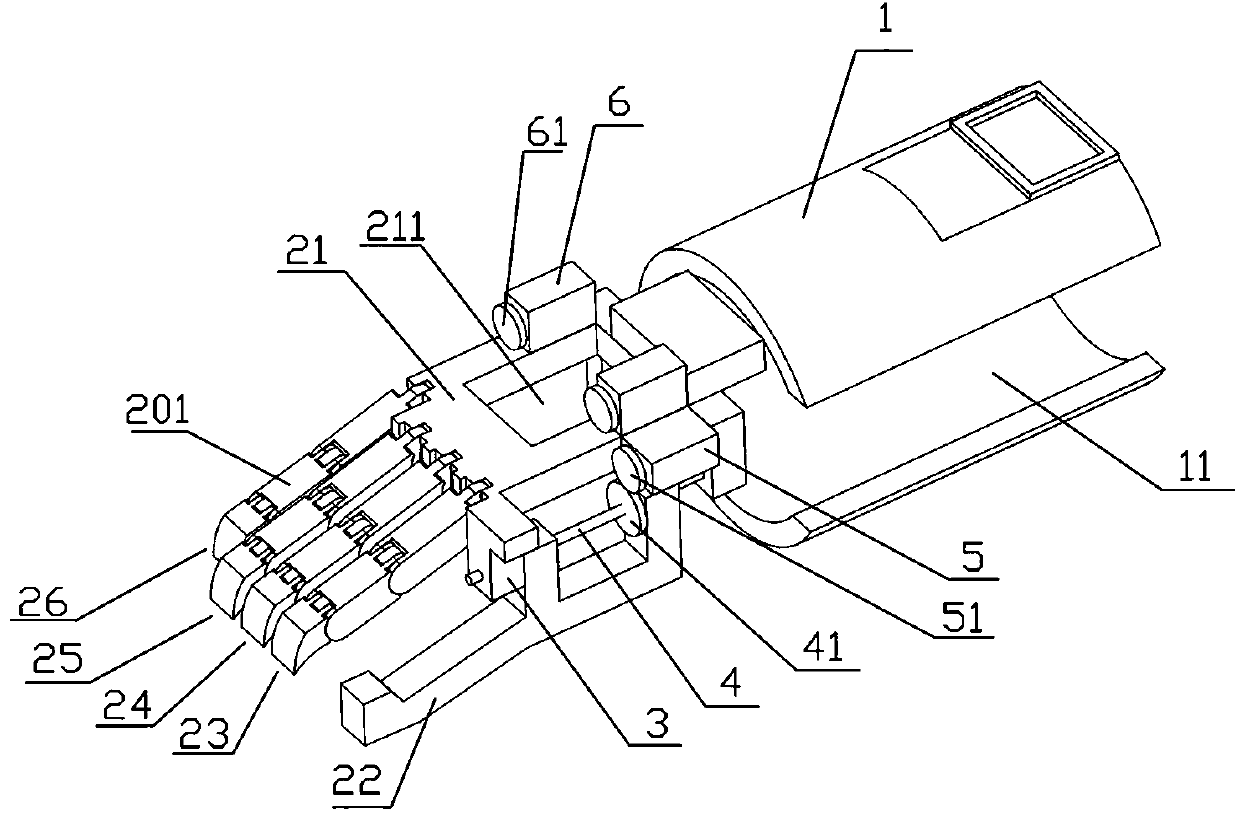
[0026] A wearable hand mechanical exoskeleton with auxiliary grasping and rehabilitation training functions, including a flexibly connected arm ring 1 and a hand support, the hand support including a palm frame 21, a thumb frame rotatably connected to the palm frame 21 22. Index finger skeleton 23, middle finger skeleton 24, ring finger skeleton 25, little finger skeleton 26; the index finger skeleton 23, middle finger skeleton 24, ring finger skeleton 25 and little finger skeleton 26 all include three phalanges 201 connected by rotation; the index finger skeleton 23 , The middle finger skeleton 24, the ring finger skeleton 25, and the little finger skeleton 26 are provided with torsion springs at the rotational connection between the palm skeleton 22 and the adjacent phalanges 201; one side of the palm skeleton 21 There is a rotating shaft frame 3, the rotating shaft frame 3 is provided with a rotating shaft 4 parallel to the palm frame 21, and the thumb frame 22 is rotatably c...
Embodiment 2
[0029] On the basis of Embodiment 1, the rope steering gear 6 has two rope steering gears, one rope steering gear 6 connects the index finger skeleton 23 and the middle finger skeleton 24 through a rope, and the rope rope steering gear 6 The ring finger skeleton 25 and the little finger skeleton 26 are connected by a drawstring. The design can effectively reduce the working pressure of each rope steering gear, thereby improving the stability of operation.
[0030] In addition, the arm ring 1 is provided with a control board, the control board is electrically connected to the gear steering gear 5 and the rope steering gear 6, and the arm ring 1 and the thumb skeleton 22 are both provided with operation Button, the operation button is electrically connected to the control board. The control board adopts the Raspberry Pi control board in this embodiment, and the setting position of the operation button provides the user with more operation choices and operation convenience. At the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More