

Parallel type three-degree-of-freedom force feedback manual controller and control method thereof
A technology of degree of freedom and force feedback, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve problems that limit the development of human-computer interaction technology, and achieve the effects of reduced calculation, large output force range, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
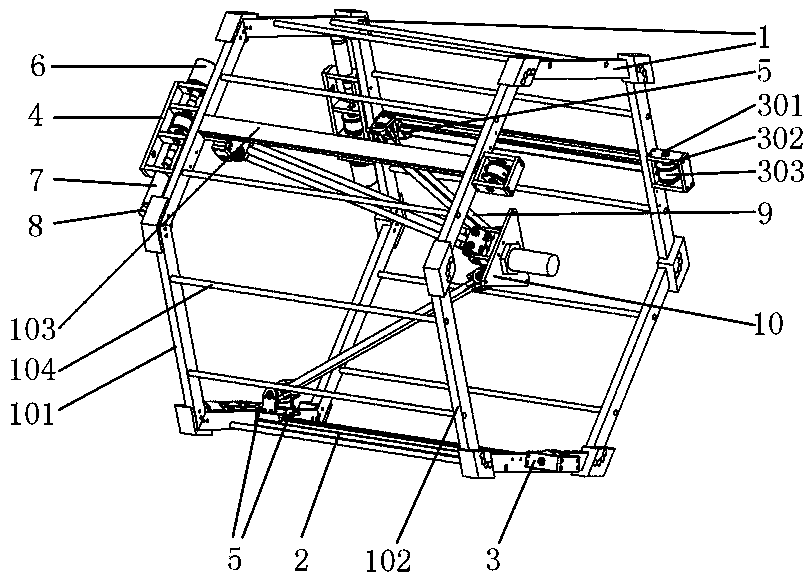
[0035] Such as figure 1 , an embodiment of the present invention, including a base 1 . The base 1 is a cage-like structure composed of a front hexagonal frame 101 , a rear hexagonal frame 102 , three rail bottom plates 103 and several connecting rods 104 . The guide rail bottom plate 103 and the connecting rod 104 jointly fix and connect the parallel front hexagonal frame 101 and the rear side hexagonal frame 102 , and the guide rail bottom plate 103 and the connecting rod 104 are perpendicular to the plane where the front hexagonal frame 101 is located.
[0036] This embodiment also includes three groups of moving parts arranged symmetrically to the center; each group of moving parts includes a linear guide rail module 2 and a parallel linkage mechanism 9, and also includes front sides respectively arranged on the front and rear sides of the linear guide rail module 2 Transmission mechanism 3 and rear side transmission mechanism 4.
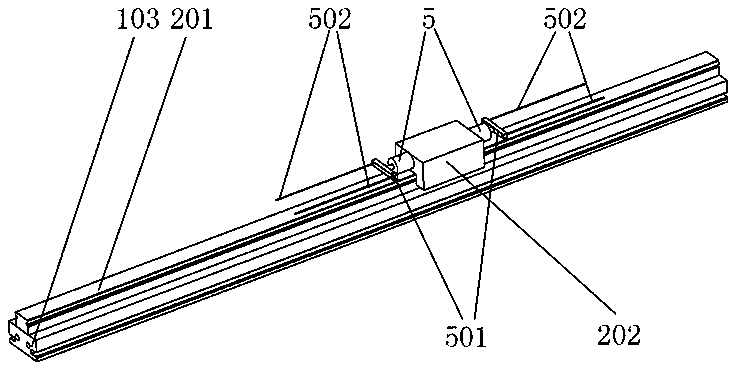
[0037] Such as figure 2 , the linear g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More