Robot and its control method
A robot and control module technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as stretching patients, sudden changes in the height of the robotic arm, and potential safety hazards, and achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
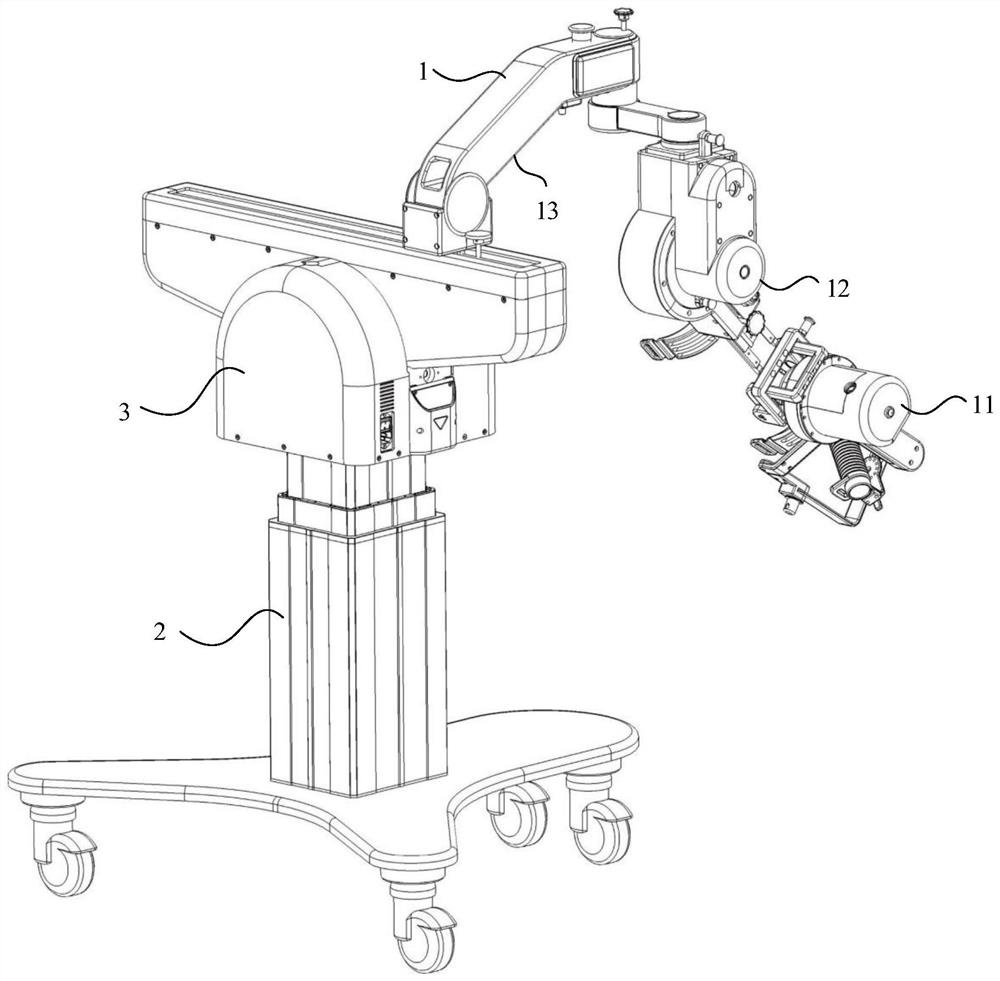
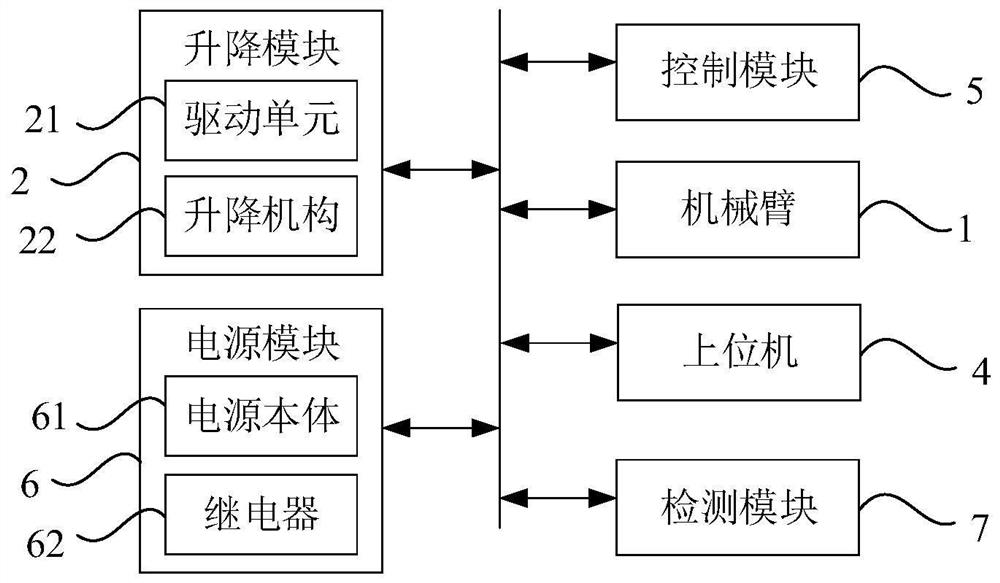
[0045] This embodiment provides a robot for assisting patients with upper limb dysfunction to carry out rehabilitation training, such as Figure 1-2 As shown, the robot of this embodiment includes a mechanical arm 1 , a lifting module 2 , a control box 3 and a host computer 4 . The control box 3 is provided with a control module 5 and a power supply module 6 . The power supply module 6 is used to supply power to the mechanical arm 1 , the lifting module 2 and the control module 5 , and the lifting module 2 is electrically connected to the control module 5 and the host computer 4 respectively. see figure 1 , the mechanical arm 1 specifically includes an elbow motor 11 , a shoulder motor 12 and a cantilever 13 .
[0046] When the robot is in the non-training mode, the lifting module 2 can drive the mechanical arm 1 to move up and down.
[0047] Specifically, the lifting module 2 includes a drive unit 21 and a lifting mechanism 22 . The power supply module 6 supplies power to...
Embodiment 2
[0057]This embodiment provides a method for controlling a robot, which is used to control the robot shown in Embodiment 1. The control method includes the following steps: when the robot is in the training mode, control the lifting module to stop moving, so as to fix the height of the mechanical arm. Thus, avoiding the sudden change of the height of the robotic arm during the rehabilitation training process, pulling and stretching the patient's muscles.
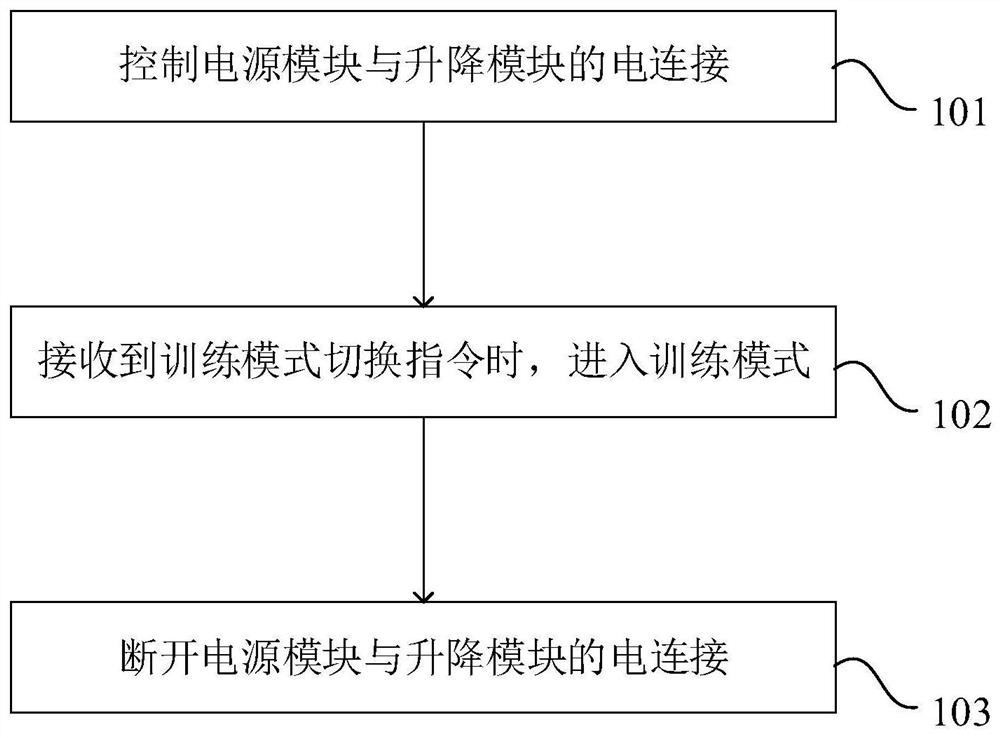
[0058] Further, such as image 3 As shown, the control method includes the following steps:
[0059] Step 101, control the electrical connection between the power supply module and the lifting module.
[0060] When the robot has just started or received a non-training mode switching instruction, the robot is in the non-training mode at this time, and the control power supply module is electrically connected to the lifting module. Go to the lifting module to adjust the height of the robotic arm, and adjust the robotic arm t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com