

Soil moisture detection and data processing robot control method
A soil moisture and data processing technology, applied in two-dimensional position/channel control, vehicle position/route/height control, soil material testing, etc., which can solve the difficulty of sensor maintenance, inability to detect in real time, and increase the cost of sensor input, etc. problems, to achieve the effect of improving detection efficiency, reducing input costs and maintenance costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
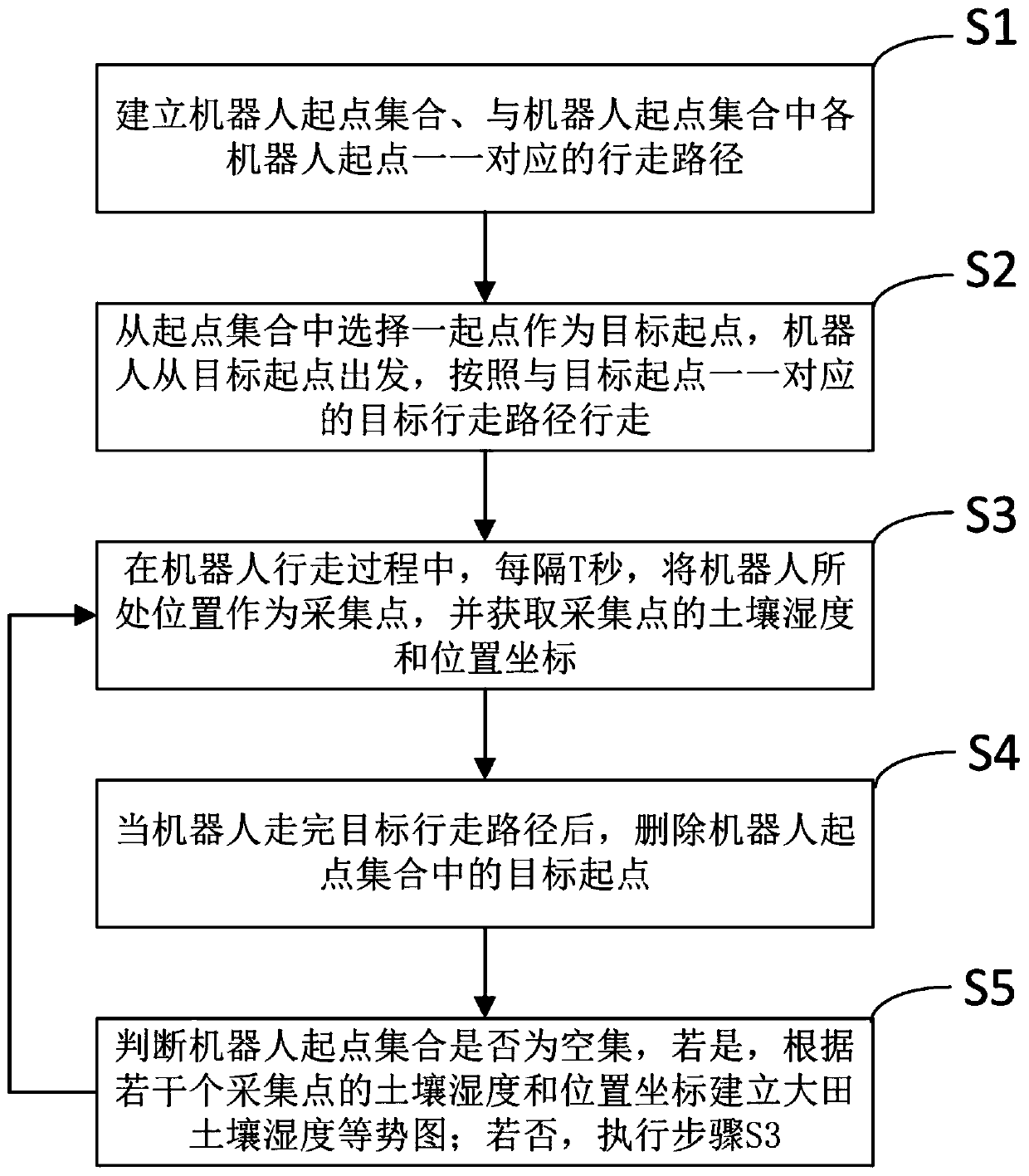
[0020] refer to Figure 1 to Figure 3 , a robot control method for soil moisture detection and data processing proposed by the present invention, comprising:
[0021] Step S1, establishing a robot starting point set and a walking path corresponding to each robot starting point in the robot starting point set.
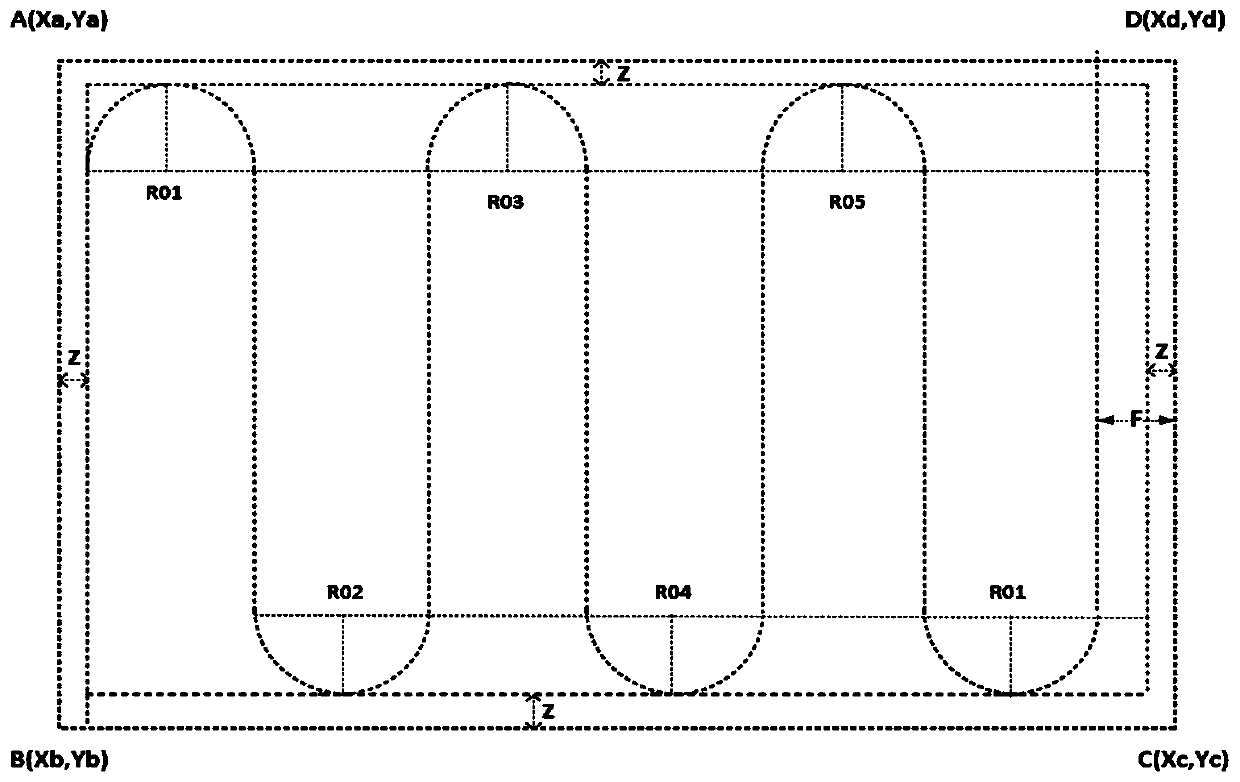
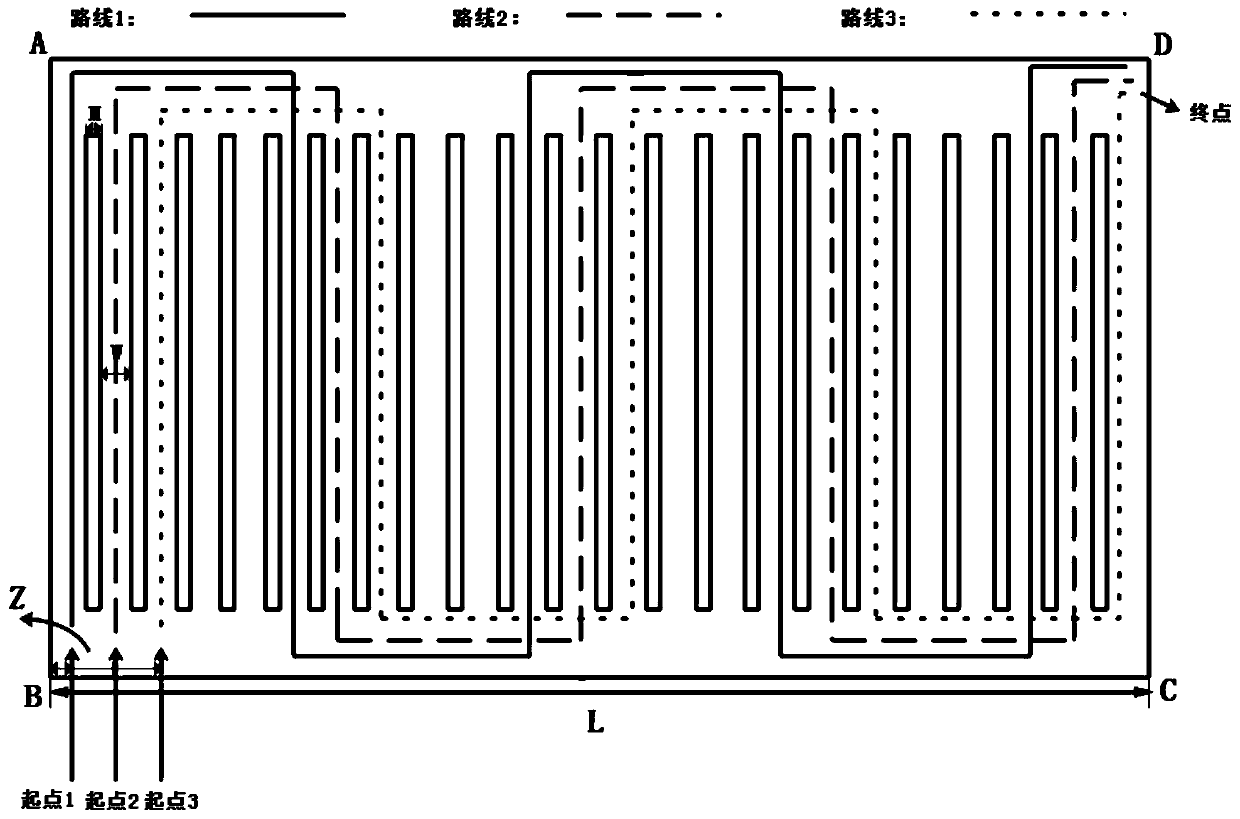
[0022] This step specifically includes: the side of the robot close to the edge of the field is the outer wheel of the robot, and the starting point of the robot is determined through the gap between the outer wheel of the robot and the edge of the field. The value range of the gap Z between the outer wheel of the robot and the edge of the field is: 0<Z<(L-nM-(n -1)W-R), select N points within the value range of Z to establish a starting point set for the robot, where L is the width of the field, n is the number of ridges of crops in the field, M is the width of the ridge, W is the distance between ridges, and R is The minimum turning radius of the robot;
[0023] Tak...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More