

Underwater glider platform based cross array line spectrum target passive detection method
An underwater glider, passive detection technology, applied in the direction of radio wave measurement system, measurement device, sound wave re-radiation, etc., to achieve the effect of far passive detection distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0035] Specific implementation mode one: a kind of passive detection method of cross-front spectrum target based on underwater glider platform in this embodiment The specific process is as follows:
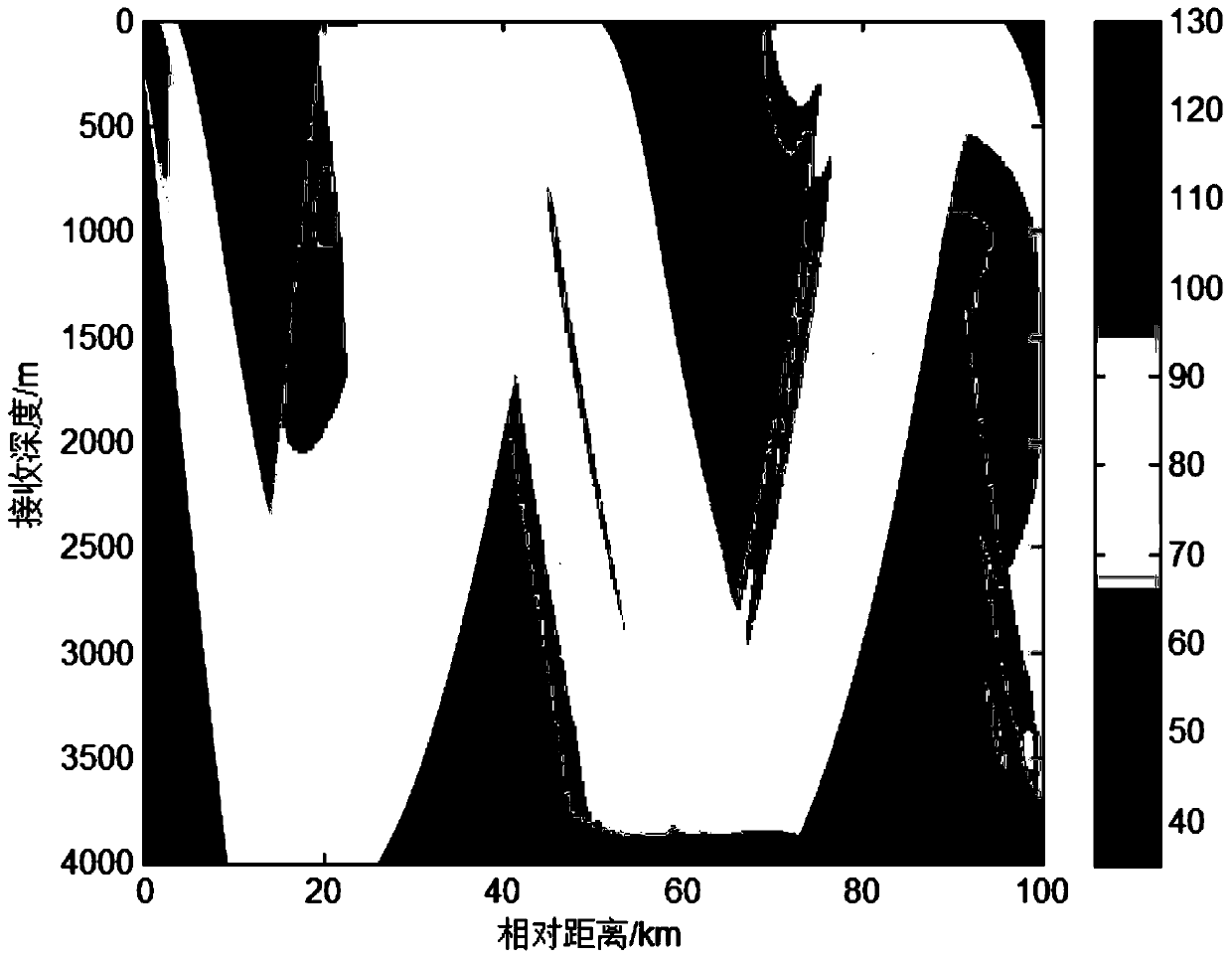
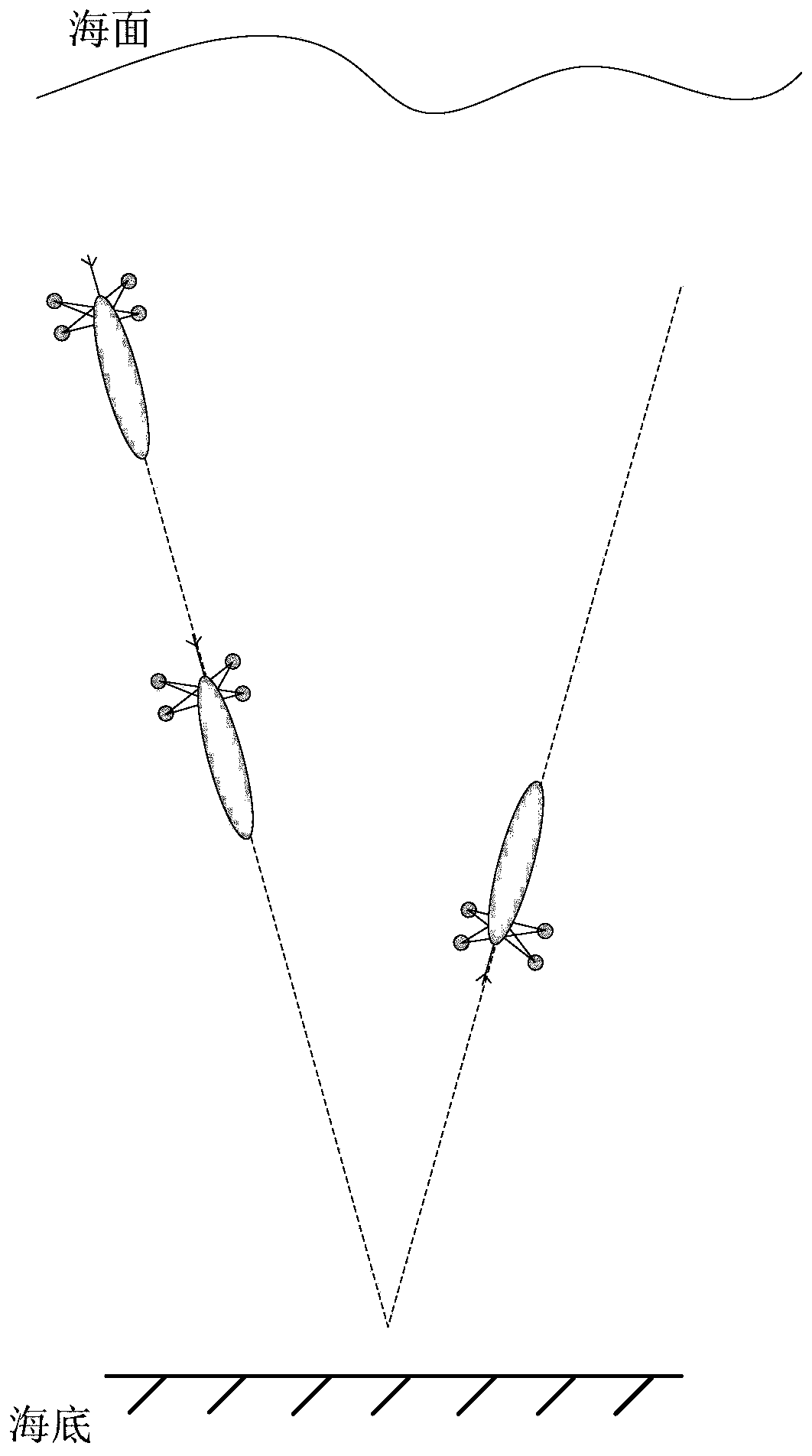
[0036] like figure 1 As shown, there are obvious sound convergence and shadow zone effects in deep-sea sound propagation, and the depth of target sound convergence areas at different distances is different. The detection performance of the system is greatly affected by the working depth. The detection system must have the ability to collect and record acoustic information at multiple depths. , to ensure that the detection equipment can detect targets located at different distances, the glider platform has the ability to maneuver in the depth direction, and is a good carrier that can meet the above requirements. Therefore, in order to make full use of the deep maneuverability of the glider, the presented method designs a processing method for long integration of the depth measureme...
specific Embodiment approach 2
[0050] Specific embodiment two: the difference between this embodiment and specific embodiment one is that in the step 1, a sub-array signal composed of 1 and 3 array elements of the cross array collected in the downlink process of the underwater glider platform is segmented Cross-spectrum calculation to obtain a set of segmented cross-spectrum results;
[0051] Segmented cross-spectrum calculations are performed on a sub-array signal composed of 2 and 4 elements of the cross array collected during the downlink process of the underwater glider platform, and a group of segmented cross-spectrum results are obtained;
[0052] The specific process is:
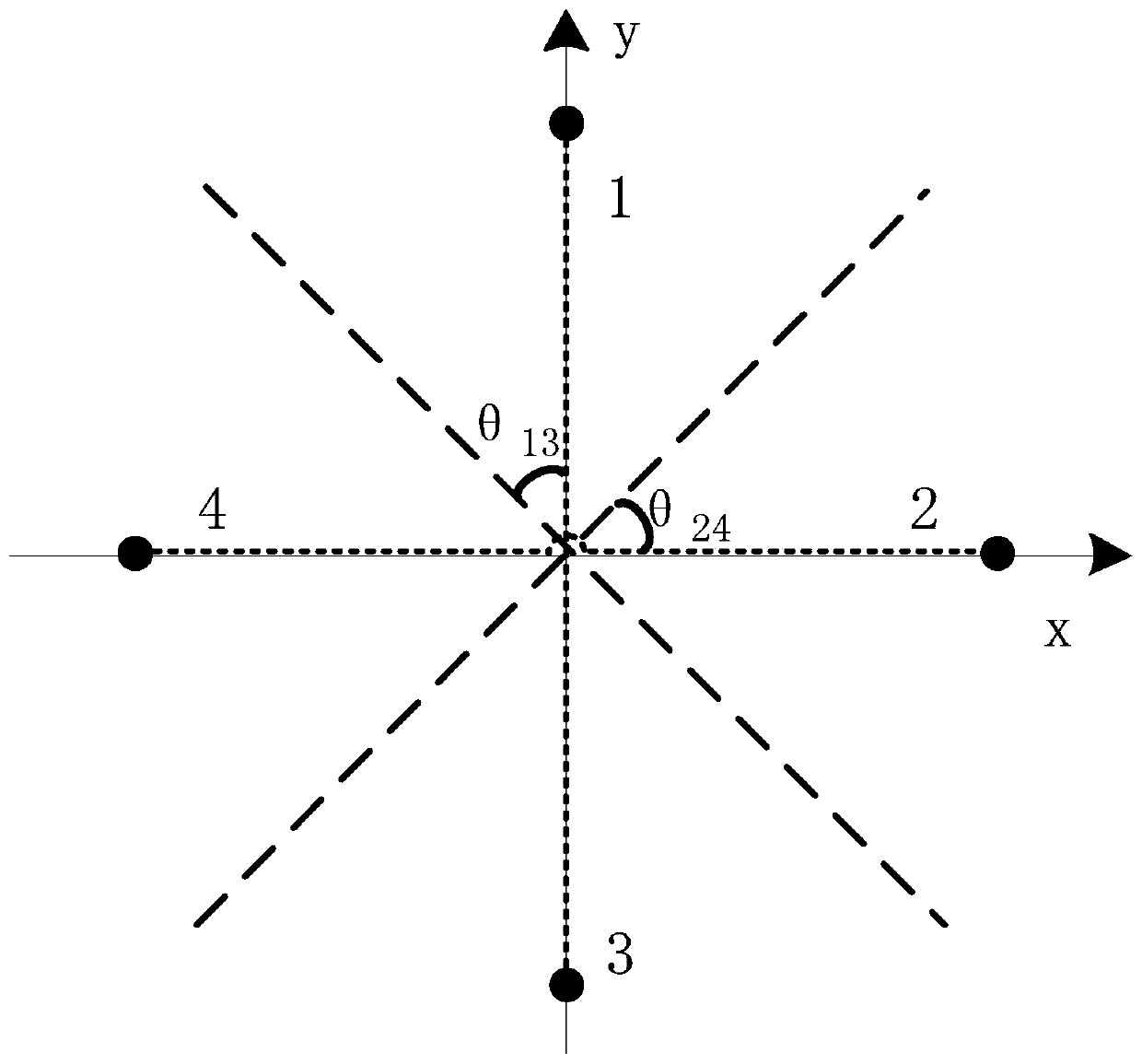
[0053] Process such as image 3 As shown, 1, 2, 3, and 4 in the figure represent the array element numbers.
[0054] During the downlink process of the underwater glider platform, the signals received by the 1st and 3rd elements of the cross array are collected x 1 (t), x 3 (t);
[0055] During the downlink process of the unde...
specific Embodiment approach 3
[0060] Specific embodiment three: what this embodiment is different from specific embodiment one or two is that, in described step 3, carry out line spectrum detection to cross matrix average amplitude spectrum, specific way is:
[0061] The method of two-way α filter line spectrum detection is used to detect the line spectrum of the average amplitude spectrum of the cross array, such as Figure 5 As shown, the process is:
[0062] Firstly, perform two-way α filtering on the average amplitude spectrum of the cross array to extract the background of the continuous spectrum. The process is as follows:
[0063] The specific implementation of bidirectional alpha filtering is as follows Image 6 shown.
[0064] The continuous spectrum background is extracted according to the two-way α filter formula, and the calculation formula of the two-way α filter is:
[0065] Y(k)=Y(k-1)+α[X(k)-X(k-1)]
[0066] In the formula, α is the filter coefficient; X(k) represents the input sequence...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More