

Design method for path tracking guidance and control structures of constrained unmanned ships
A design method and path tracking technology, which are applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, which can solve unfavorable engineering implementation, affect the effect of path tracking control, and manually adjust parameters. more questions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
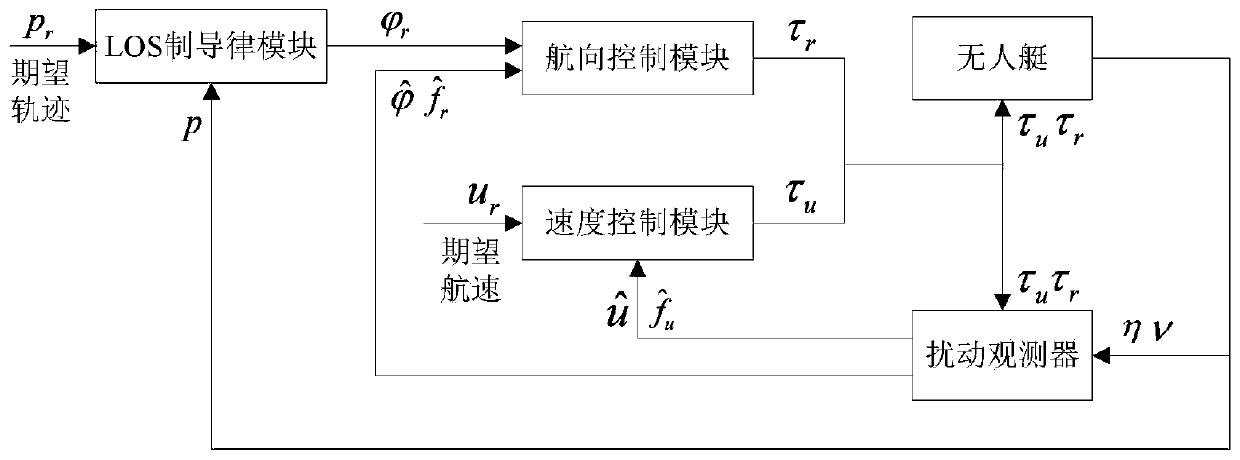
[0070] The present invention will be further described below in conjunction with the accompanying drawings. figure 1 It is a structural schematic diagram of the present invention, containing the dynamic model in the restrained unmanned ship path tracking control system containing the restrained unmanned ship to satisfy the formula (1), and the specific parameters of the model are as follows:
[0071]
[0072]
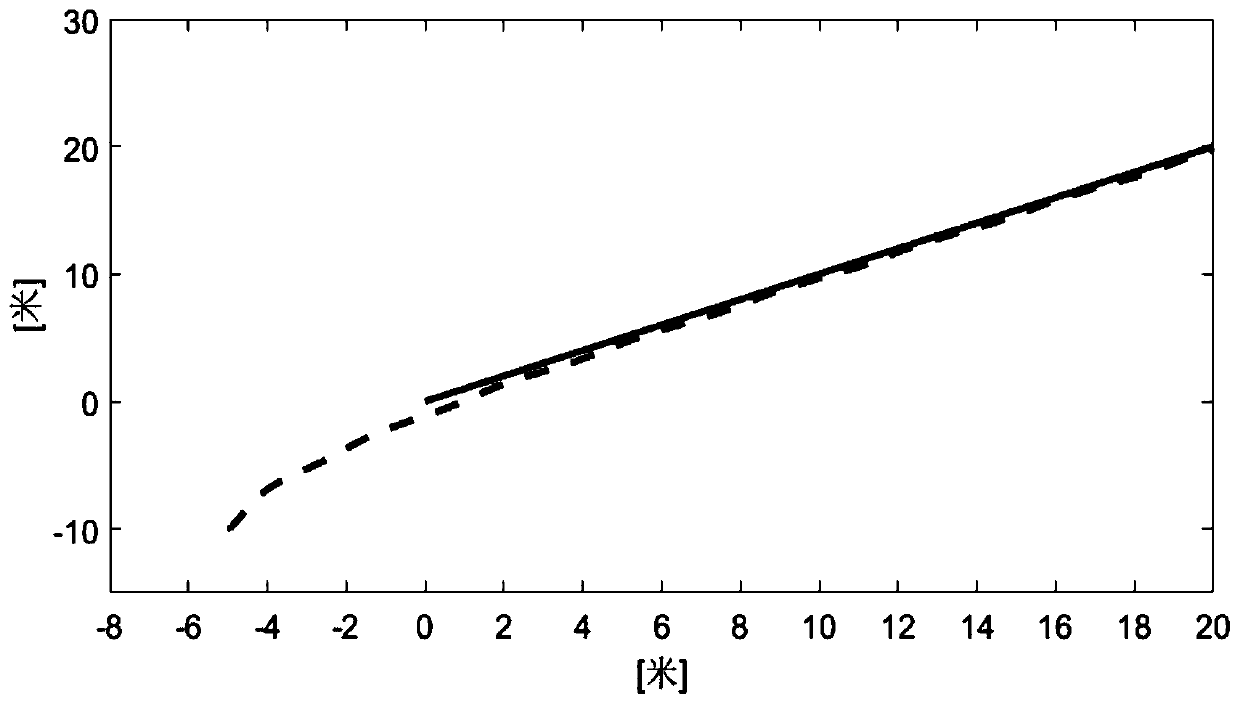
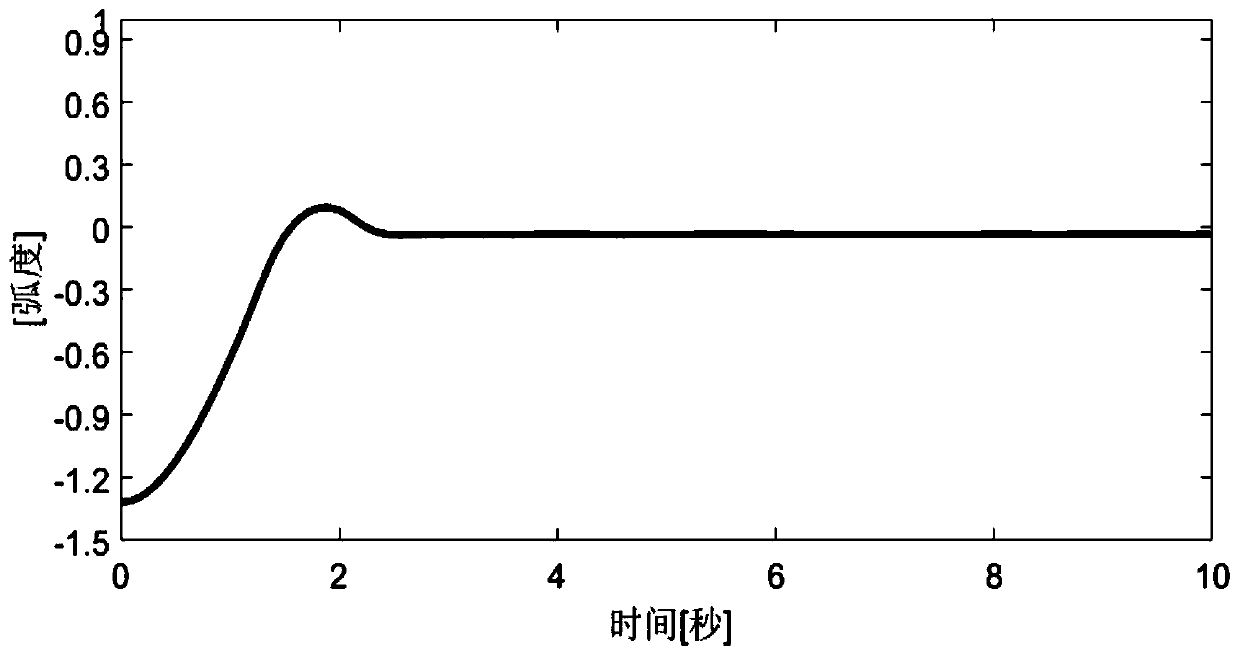
[0073] The initial position of the unmanned ship with constraints is p=[-5-10] T .
[0074] In this embodiment, the control target of the path tracking controller of the unmanned ship with constraints is to ensure that the unmanned ship with constraints accurately tracks the track of the target, and the parameters are as follows: reference position p r =[0.1t 0.1t] T , control input -10≤τ u ≤10, -5≤τ r ≤5, sampling time T=0.1, weighting factor Γ u = 0.00, the number of prediction steps n = 3, the expected longitudinal velocity of the unmanned ship with cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More