

Multi-robot scheduling method and device, server and computer readable storage medium
A scheduling method and multi-robot technology, applied in the field of robots to avoid collisions and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
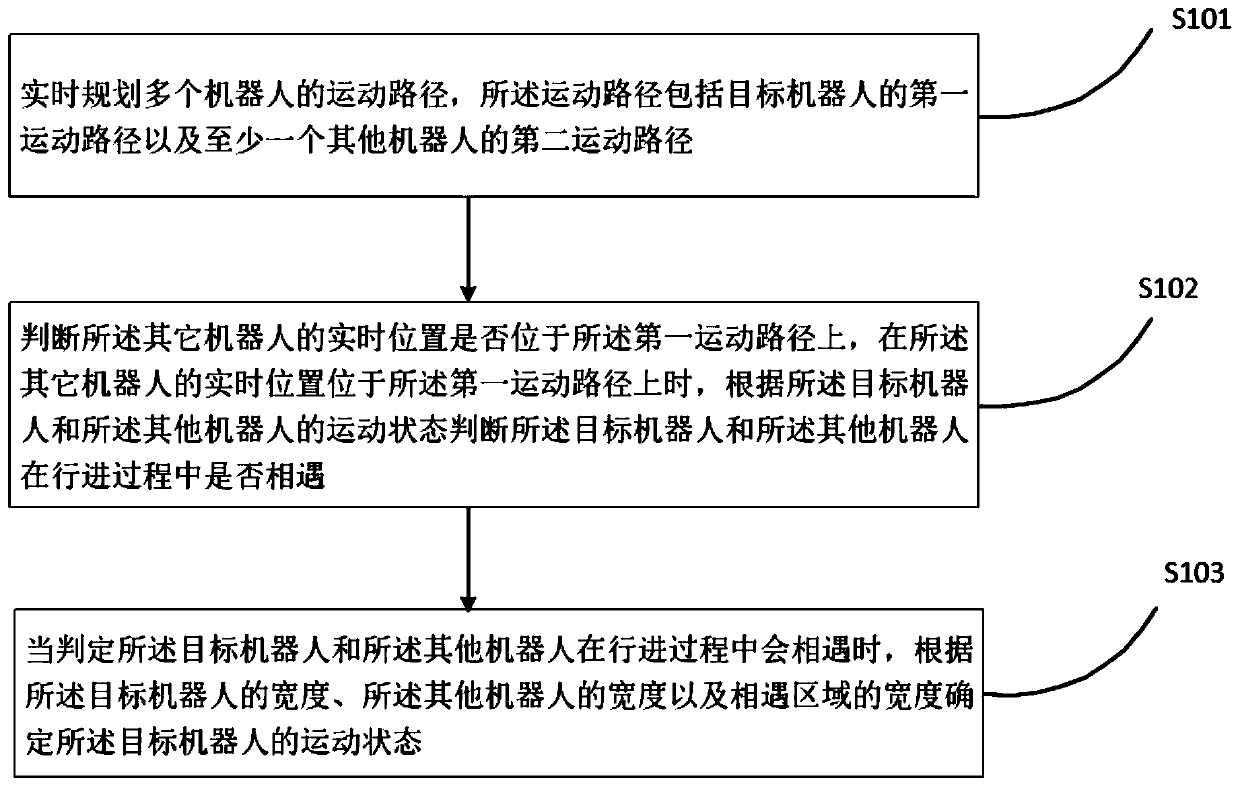
[0026] Embodiment 1 of the present invention provides a multi-robot scheduling method. This embodiment is applicable to the scheduling of multiple robots, and the method is applicable to a system architecture composed of a server and at least two robots. The execution subject of this embodiment is a server, and the method of this embodiment can be executed by a multi-robot dispatching device, which can be implemented by means of hardware and / or software, and generally can be set in the server as an application program. figure 1 It is a flow chart of the multi-robot scheduling method in Embodiment 1 of the present invention. Such as figure 1 As shown, the scheduling method includes:
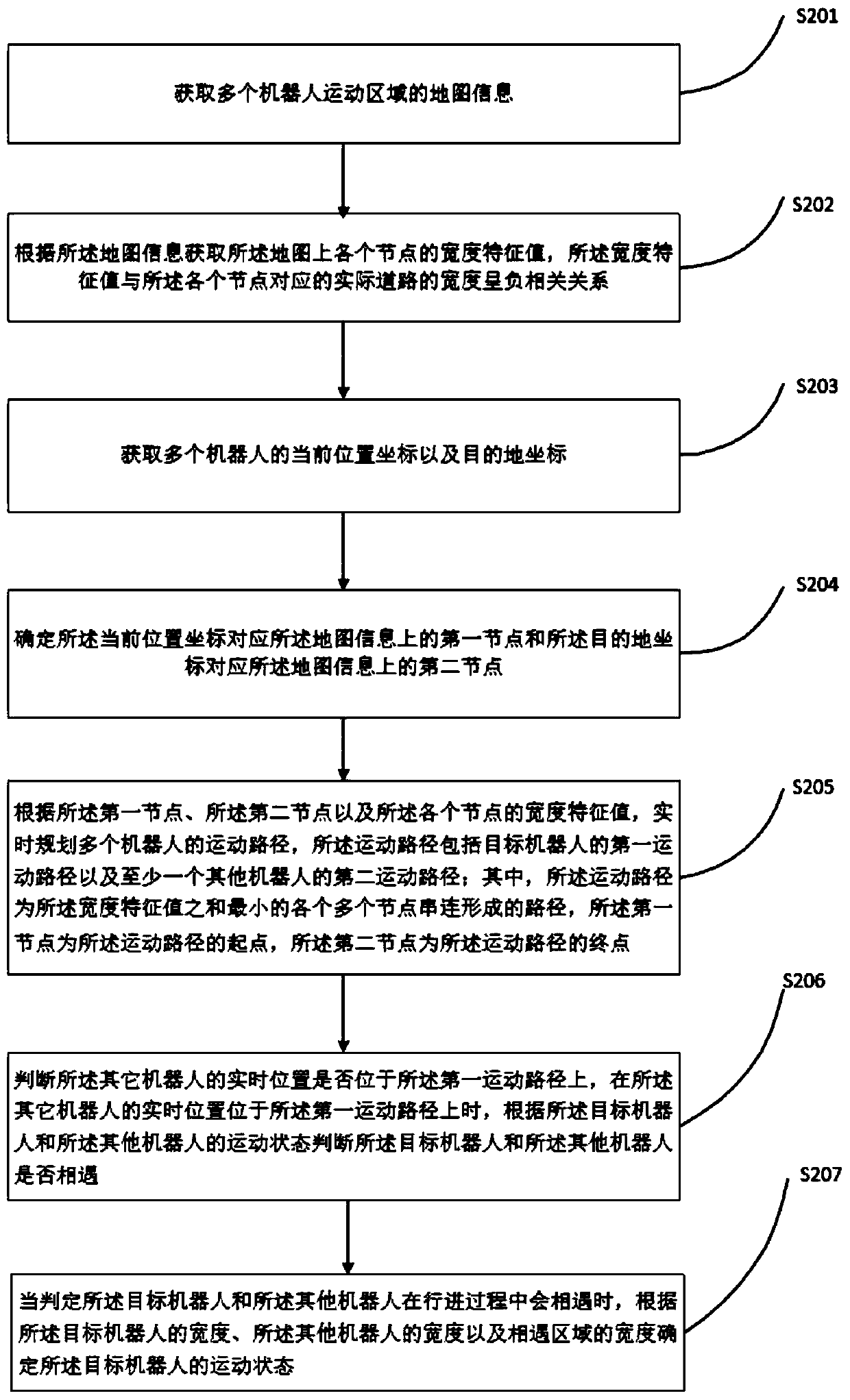
[0027] S101. Plan motion paths of multiple robots in real time, where the motion paths include a first motion path of a target robot and a second motion path of at least one other robot.
[0028] Specifically, the first movement path of the target robot is planned in real time according to the ...
Embodiment 2
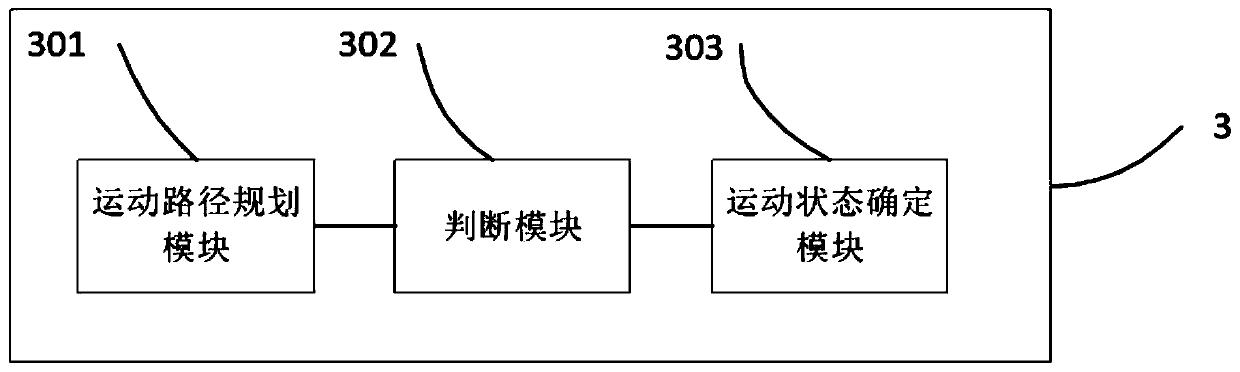
[0070] image 3 The structural block diagram of the multi-robot dispatching device provided for the second embodiment of the present invention, such as image 3 As shown, the multi-robot scheduling device 3 includes:
[0071] The motion path planning module 301 is used to plan the motion paths of multiple robots in real time, the motion paths include the first motion path of the target robot and the second motion path of at least one other robot;
[0072] Judging module 302, judging whether the real-time position of other robots is located on the first motion path, when the real-time position of other robots is located on the first motion path, judge the target robot and other robots in the process of moving according to the motion state of the target robot and other robots will meet in
[0073] The motion state determination module 303 is used to determine the motion state of the target robot according to the width of the target robot, the width of other robots, and the wid...
Embodiment 3
[0100] Figure 4 A schematic structural diagram of a server provided by Embodiment 3 of the present invention, such as Figure 4 As shown, the server includes a processor 40 and a memory 41, and the number of processors 40 in the server can be one or more, Figure 4 Taking a processor 40 as an example, the processor 40 and the memory 41 in the server can be connected through a bus or other methods, Figure 4 Take connection via bus as an example.
[0101] The memory 41, as a computer-readable storage medium, can be used to store software programs, computer-executable programs and modules, such as the program instructions / modules corresponding to the multi-robot scheduling method in the embodiment of the present invention (for example, in the multi-robot scheduling device) motion path planning module 301, judgment module 302 and motion state determination module 303). The processor 40 executes various functional applications and data processing of the server by running the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More