

Multi-mode motion primate-imitating robot
A primate, multi-modal technology, applied in manipulators, manufacturing tools, etc., can solve problems such as insufficient mobility, and achieve the effect of high flexibility and high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
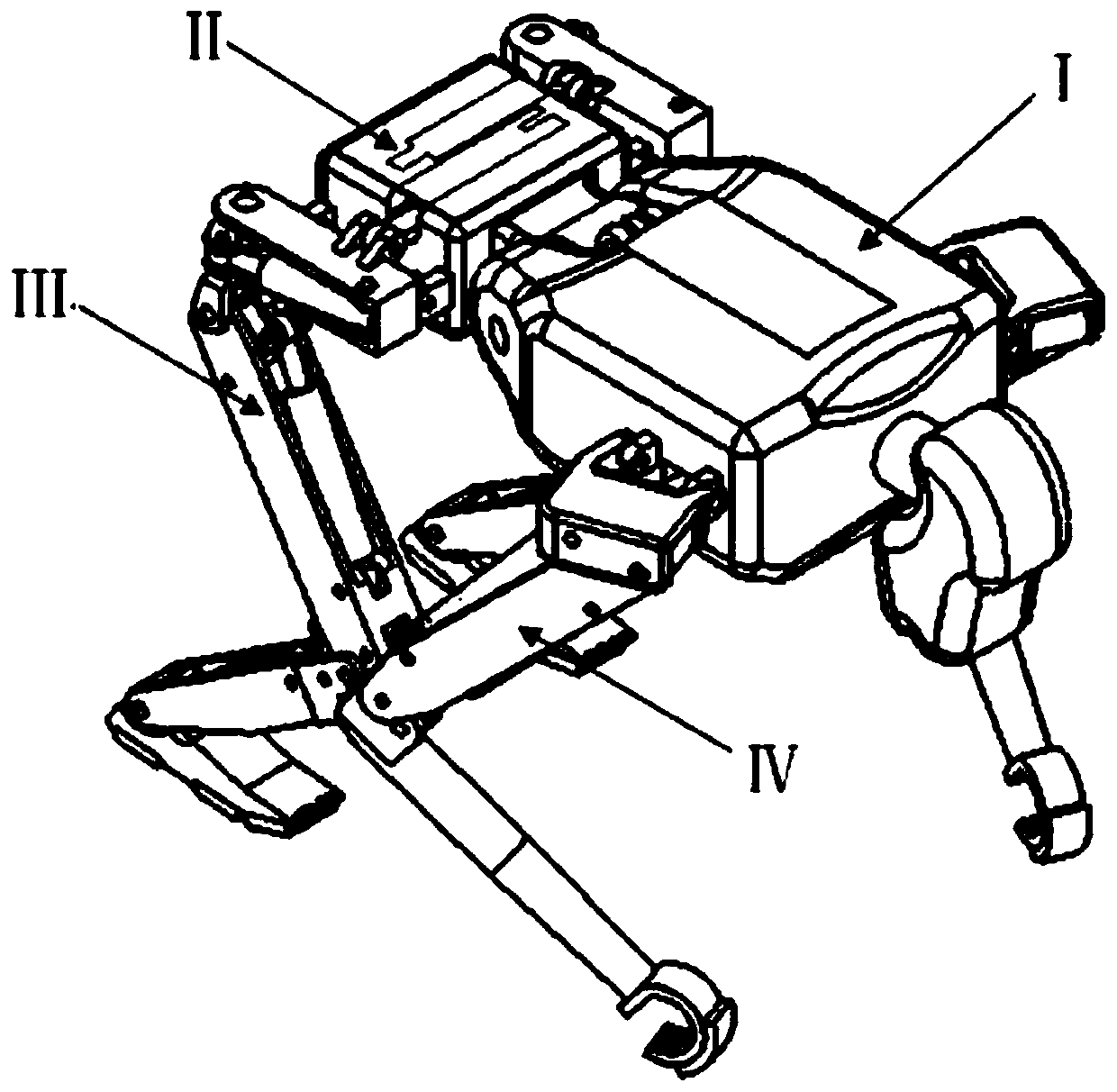
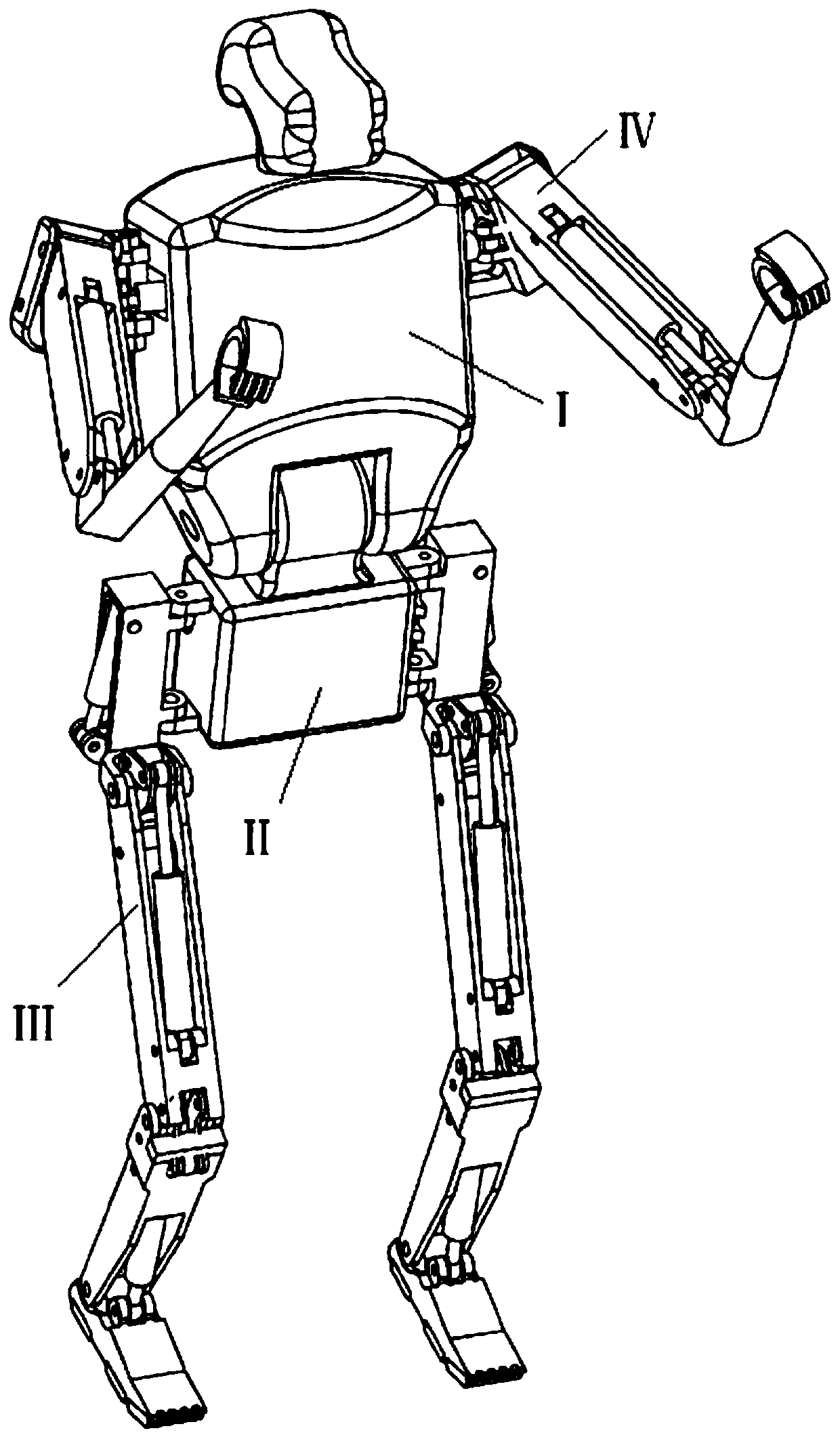
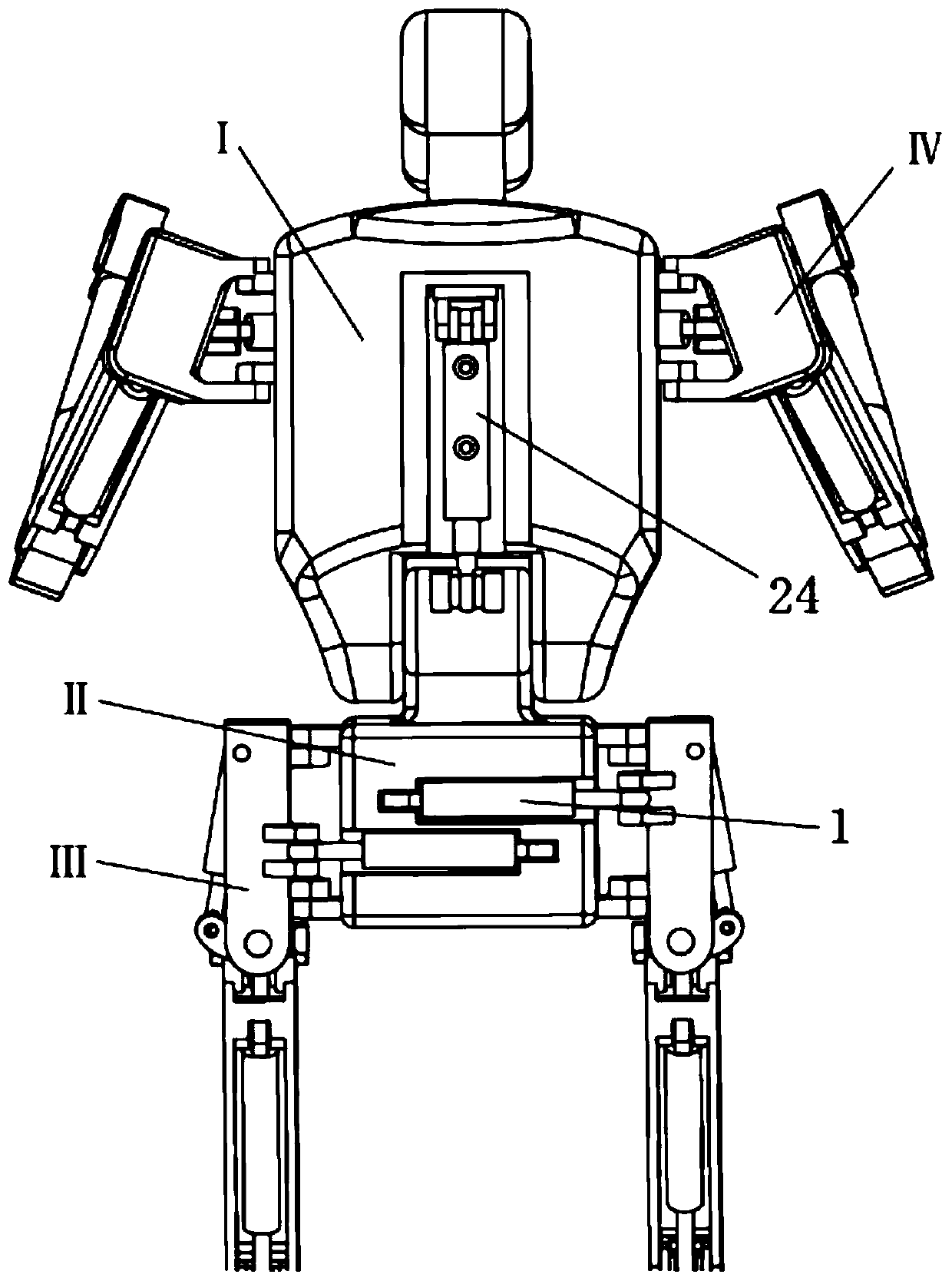
[0030] like figure 1 As shown, the multi-mode motion imitating primate robot of the present invention is mainly composed of chest I, crotch II, hind legs III and forearm IV, and there are two hind legs III and forearm IV. The chest Ⅰ and the crotch Ⅱ are hinged to form the torso through the rotating shaft (lumbar joint), and there is a degree of freedom in pitching between them. like image 3 As shown, the chest pitch hydraulic cylinder 24 is hinged between the chest I and the crotch II, and the pitch of the chest I is controlled by the linear hydraulic cylinder. The forearm IV is connected to both sides of the chest I, and the hind leg III is connected to both sides of the crotch II.
[0031] According to different actual requirements, the robot can switch between quadruped and biped modes through the cooperation of the pitch of the waist joint and the pitch joint of the rear leg III (see the working process of the rear leg III described below for details), such as figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More