

Historical map utilization method based on visual robot
A robot and map technology, applied in applications, instruments, manipulators, etc., can solve problems such as operation failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention.
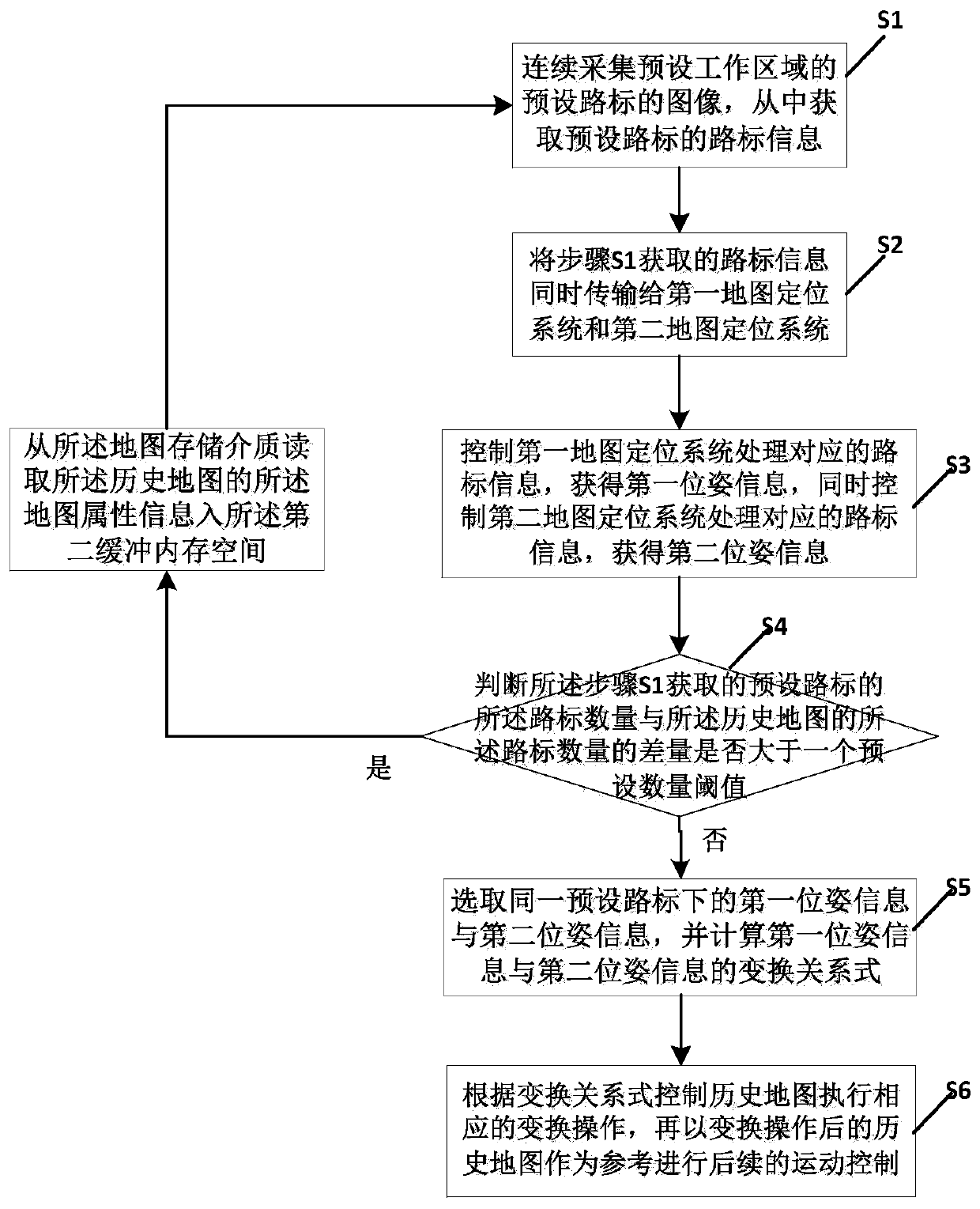
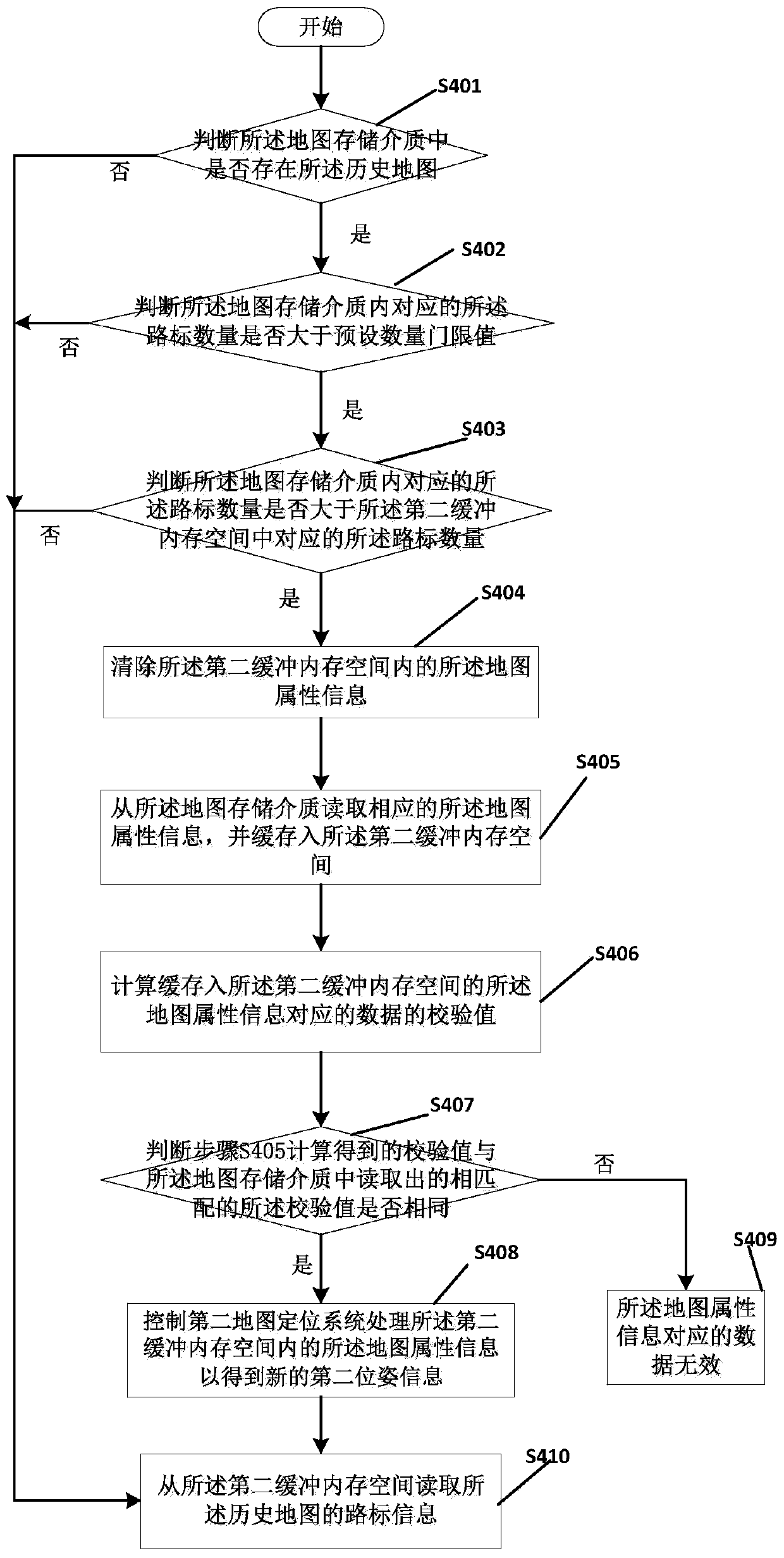
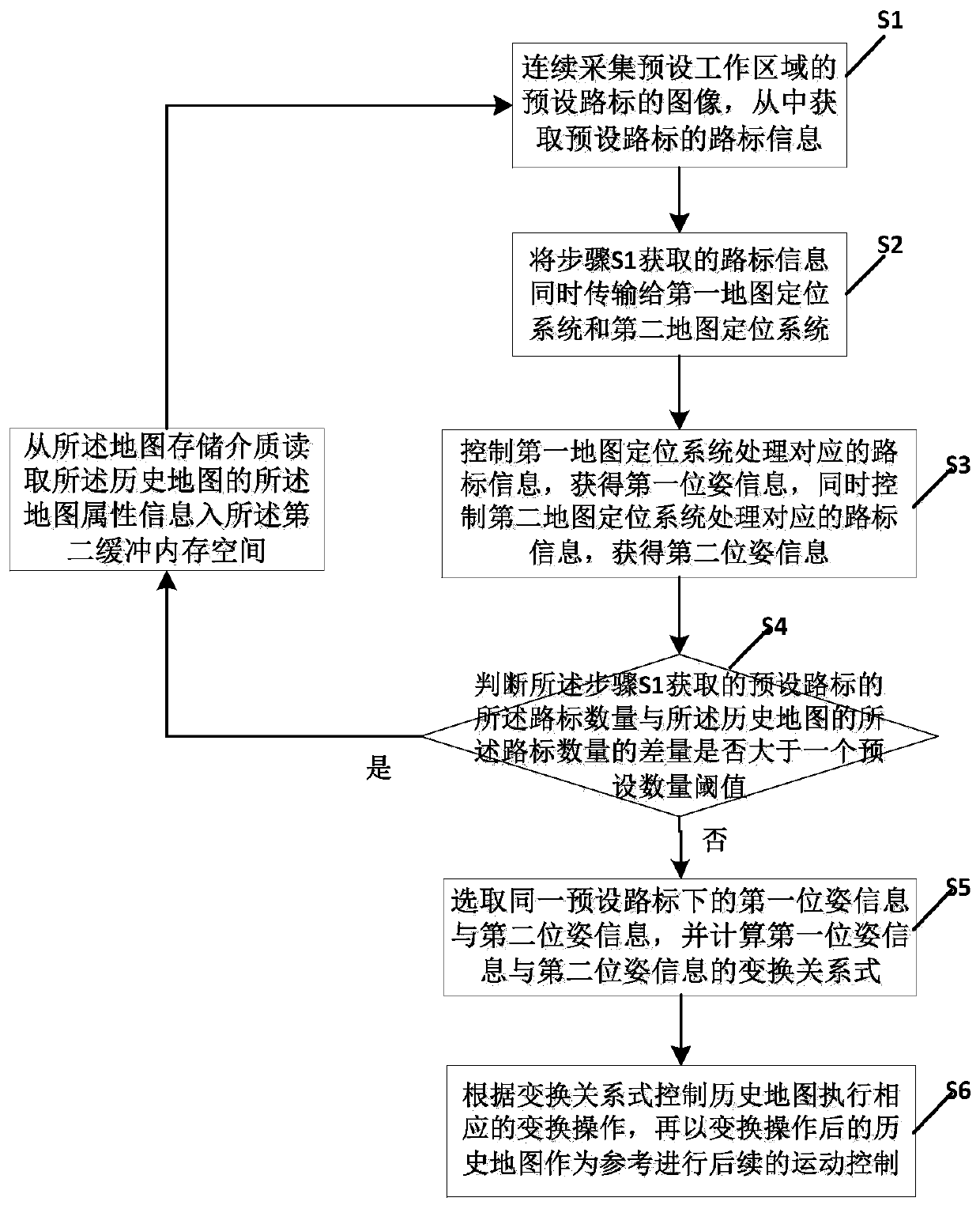
[0016] An embodiment of the present invention provides a historical map utilization method based on a visual robot. The historical map utilization method is used to control the first map positioning system based on the current map and the second map positioning system based on the historical map to work independently of each other. When the map positioning system After the front end of the system generates landmark information, it is sent to the positioning system of the historical map and the positioning system of the current map for conversion processing. The positioning information of the visual robot is generated by the aforementioned map positioning system. Specifically: according to the landmark information of the historical map, locate the current coordinates and current direction of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More