

Finite time fault-tolerant control method used for remote operation system
An operating system, limited time technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of instability of the slave robot system and affecting the working performance of the slave robot system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
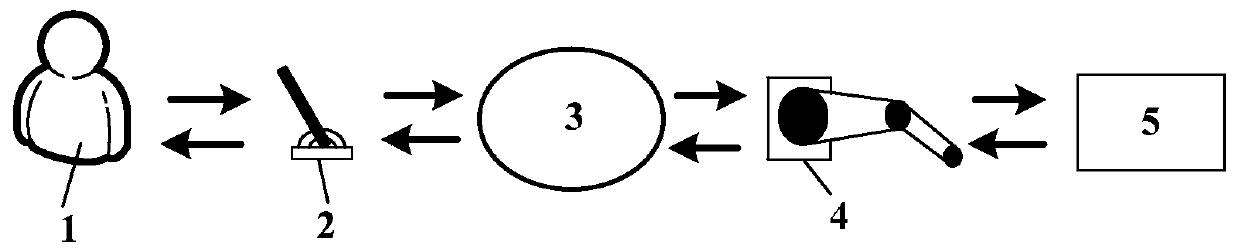
[0089] Such as figure 1 As shown, the remote operating system is also called the teleoperating system, and the remote operating system is mainly composed of five parts: the operator 1, the master robot 2, the network information transmission channel 3, the slave robot 4 and the remote external working environment 5. Its working mode can be roughly described as: the operator 1 operates the local master robot 2, and transmits information such as the position and speed of the master robot 2 to the slave robot 4 through a transmission medium such as the network, and the slave rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More