

Wall climbing crawler belt travelling module with variable camber adaptive ability
An adaptive, variable curvature technology, applied in the field of robotics, to achieve the effects of avoiding track slippage, good load capacity, and high movement flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
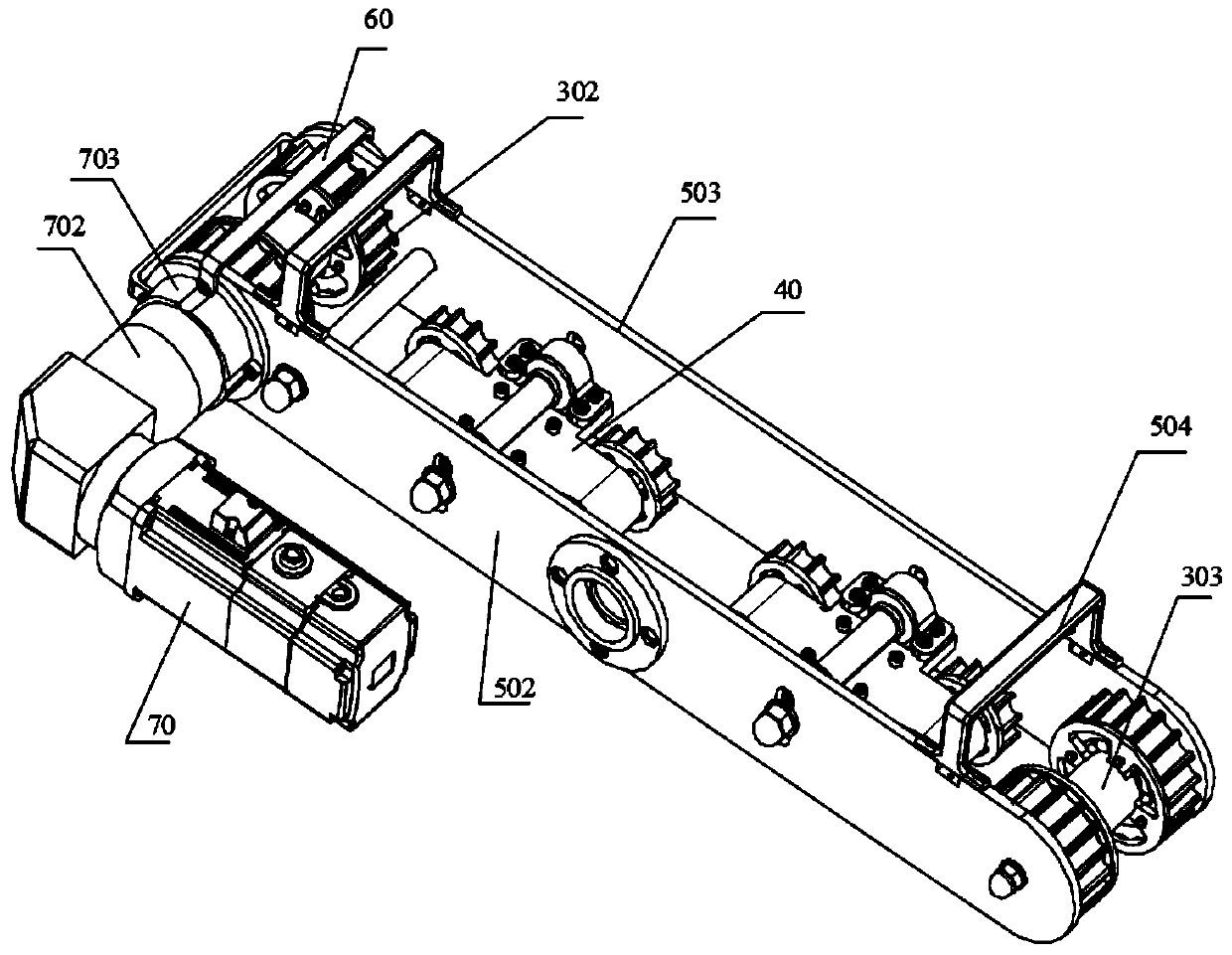
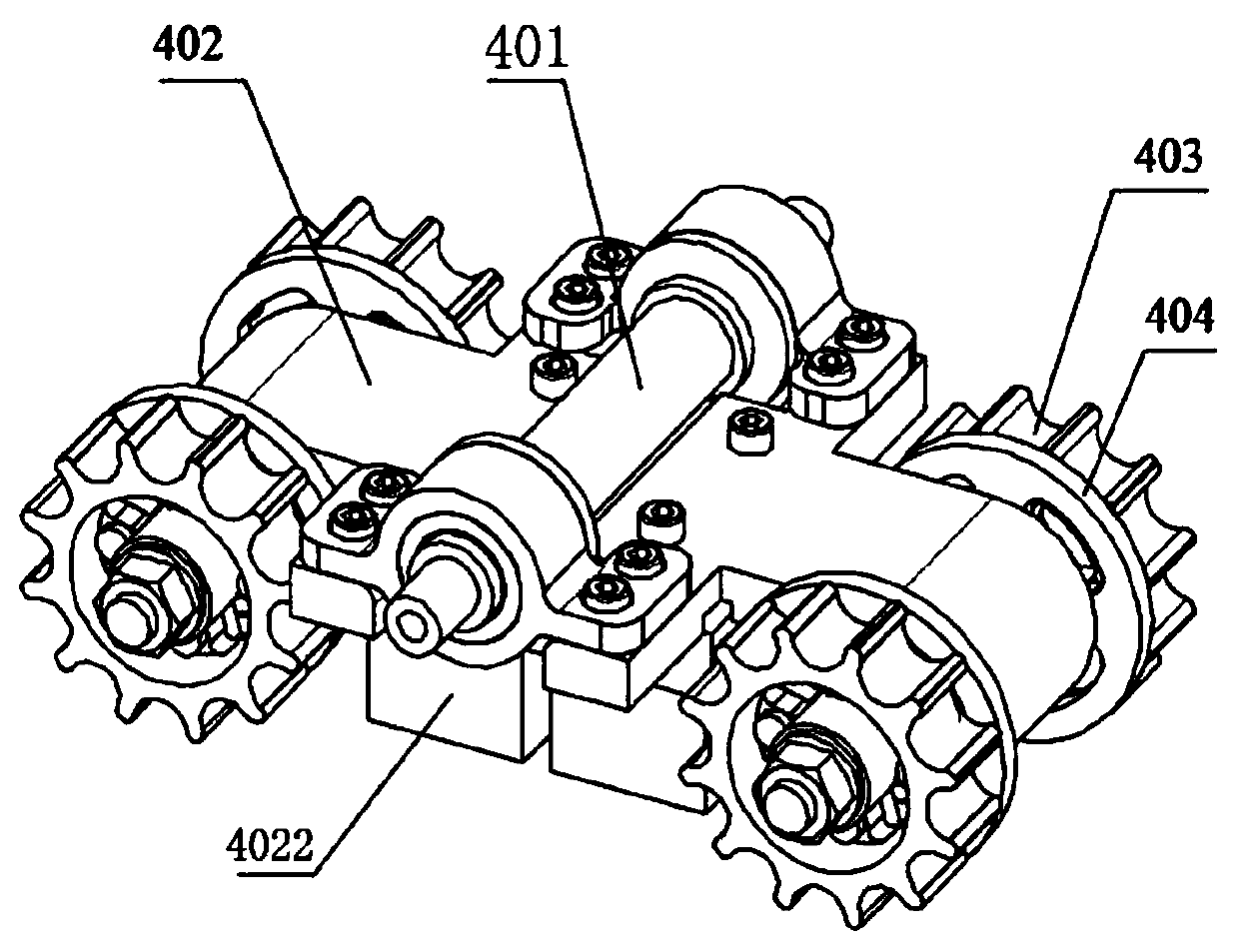
[0026] A wall-climbing crawler walking module with variable curvature self-adaptive capability, such as figure 1 As shown, the crawler walking module 30 includes a driving wheel 302, a driven wheel 303, and a pair of swing supporting wheel assemblies 40 arranged between the driving wheel 302 and the driven wheel 303, and the drive is connected through the crawler belt 501; the swing supporting wheel assembly 40 A swing shaft 401 parallel to the axes of the driving wheel 302 and the driven wheel 303 is provided on the top. The connection support for the driving wheel 302, a pair of swing shafts 401, and the driven wheel 303 can be a cantilever connection support ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More