

An optical flow sensor integrating cameras with different focal lengths
A technology of optical flow sensor and ranging sensor, which is applied in the field of optical flow sensor, can solve the problems of limiting the height, direction and range of motion of rotor drones, and achieve the effect of improving accuracy and reducing small speed errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
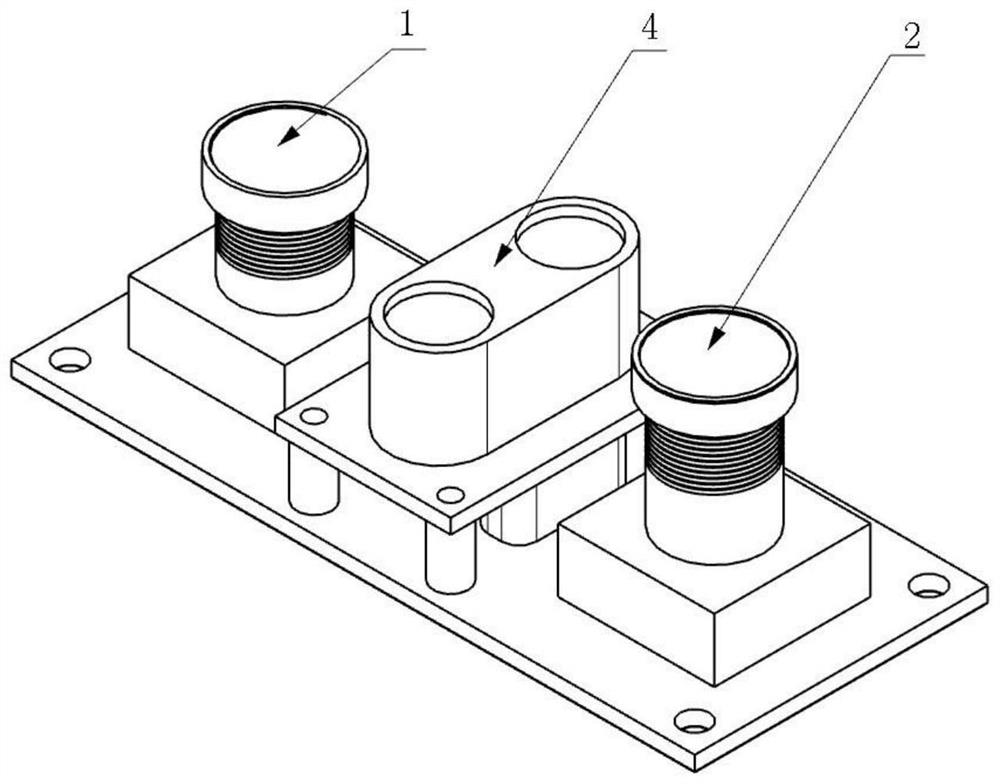
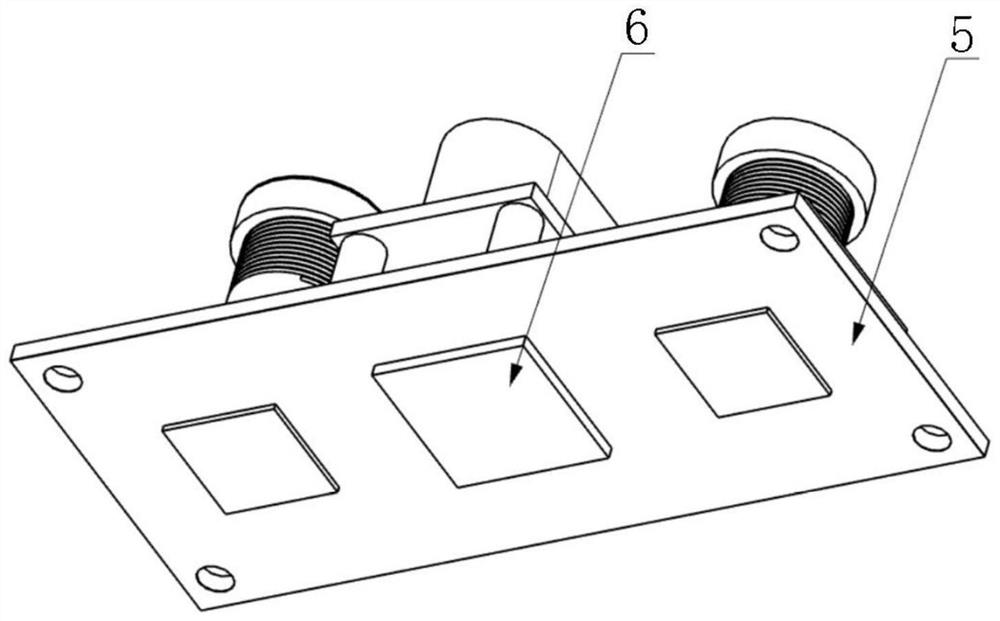
[0035] Such as figure 1 and figure 2 As shown, an optical flow sensor integrating cameras with different focal lengths provided by the present invention includes a camera 1 with a focal length of 2.8mm (the full-frame equivalent focal length is about 20mm), and a camera 2 with a focal length of 8.0mm (the full-frame equivalent focal length is about 20mm). The focal length is about 57 mm), the distance measuring sensor 4, the circuit board 5, and the embedded chip 6; wherein, the distance measuring sensor 4, the camera 1 with a focal length of 2.8 mm, and the camera 2 with a focal length of 8.0 mm are arranged on the top of the circuit board 5 On the side, the embedded chip 6 is arranged on the bottom side of the circuit board 5, and the embedded chip 6 is respectively connected to the distance measuring sensor 4, the camera 1 with a focal length of 2.8 mm, and the camera 2 with a focal length of 8.0 mm.
[0036]Camera 1 with a focal length of 2.8mm and camera 2 with a focal ...
Embodiment 2
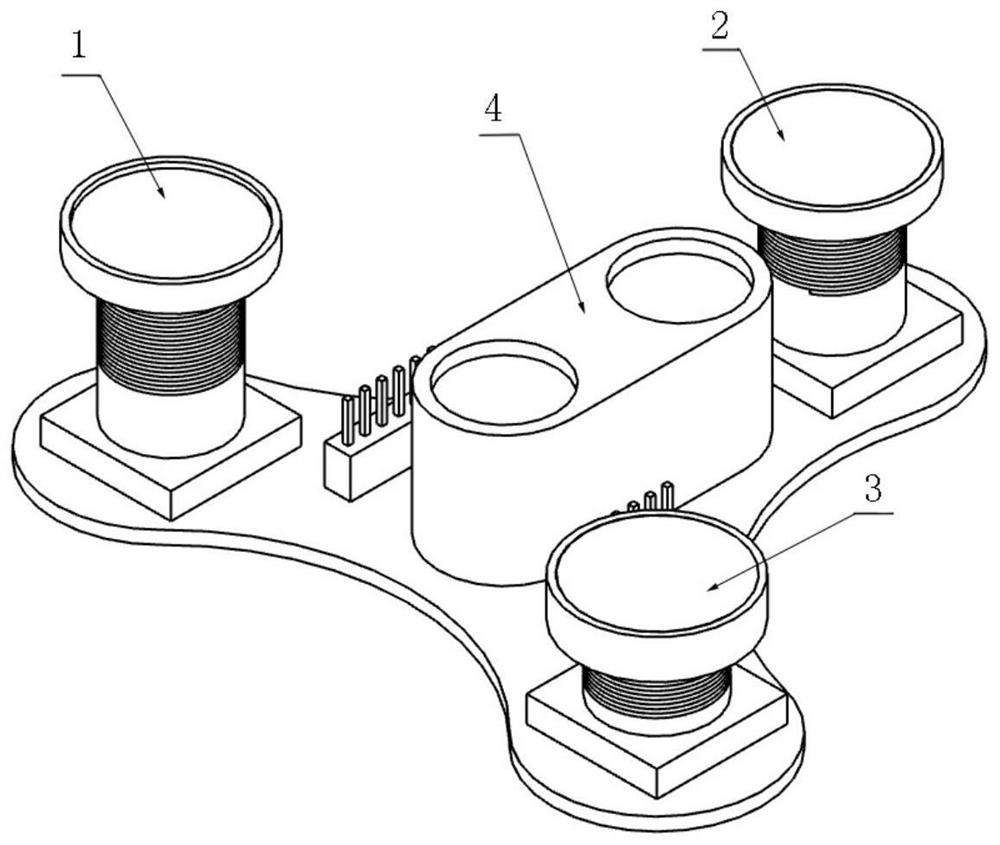
[0040] On the basis of Embodiment 1, in this embodiment, a camera 1 with a focal length of 2.8 mm, a camera 2 with a focal length of 8.0 mm, and a camera 3 with a focal length of 16.0 mm (the full-frame equivalent focal length is about 114 mm respectively), wherein, The reasonable use height range of the images collected by camera 3 with a focal length of 16.0mm is 2.5m-8.0m; camera 1, camera 2 and camera 3 have a range of 0.2m and 0.5m from 1.0m to 1.2m, 2.5m to 3.0m, respectively. Overlapping working ranges. By adding the camera 3 with a focal length of 16.0mm, the working range of the optical flow sensor to obtain images with clear texture and moderate picture range is greatly improved, and the positioning of the rotor UAV in a larger plane moving space is realized.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More