

Error constraint control method for unmanned surface vehicle considering input saturation
A technology of error constraints and control methods, applied in two-dimensional position/channel control, adaptive control, general control system, etc., can solve the problem of low navigation control accuracy of surface unmanned boats, and improve navigation control accuracy , reduce errors, and solve the effect of low navigation control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
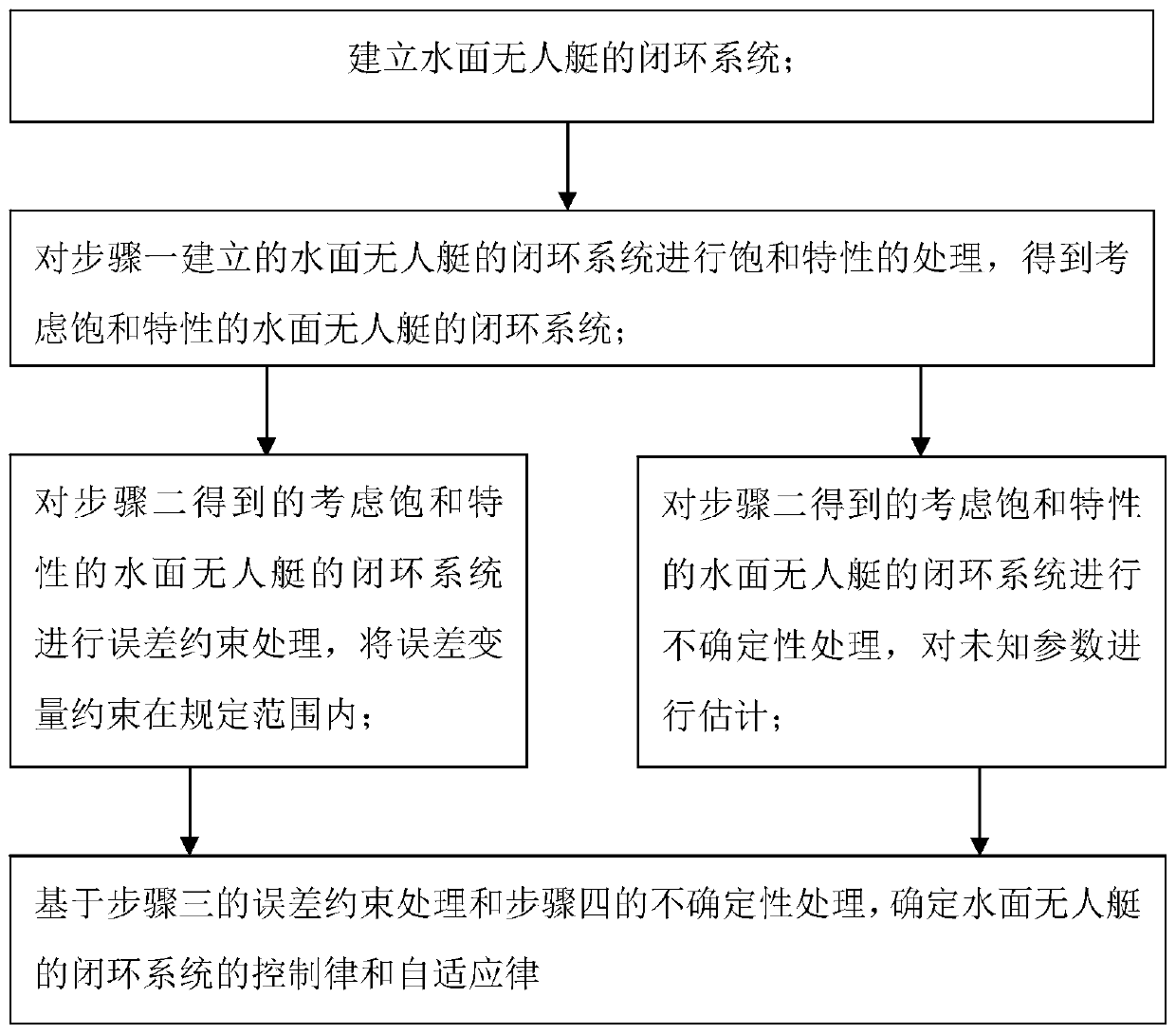
[0031] Specific implementation mode one: combine figure 1 Describe this embodiment, the specific process of an error-constrained control method for an unmanned surface vehicle considering input saturation in this embodiment is:
[0032] Ground coordinate system (O-XY): The coordinate origin O is located at the junction of the mooring line and the mooring terminal, and the plane where the XY axes are located is parallel to the ground.
[0033] Satellite coordinate system (o-xy): the origin o of the coordinates is located at the center of gravity of the surface unmanned boat, the x-axis points from the stern to the bow along the longitudinal axis, and the y-axis points to the port side.
[0034] Trajectory tracking control method: pre-set the sailing route of the surface unmanned boat, and control the surface unmanned boat to sail according to this trajectory.
[0035] Barrier Lyapunov function method in tan form: a state constraint control method based on the potential functi...
specific Embodiment approach 2
[0045] Specific embodiment two: the difference between this embodiment and specific embodiment one is that the closed-loop system of the surface unmanned boat is established in the step one; the specific process is:
[0046] Determine the symmetric positive definite inertia matrix M, the centripetal force and Coriolis force matrix C(ν), and the damping matrix D(ν);
[0047] According to the nature and hydrodynamic parameters of the target surface unmanned vehicle, the above M, C(ν), D(ν) can be determined;
[0048] Based on the symmetric positive definite inertia matrix M, the centripetal force and Coriolis force matrix C(ν), and the damping matrix D(ν), determine the non-singular transformation matrix J(η) of the surface unmanned vehicle from the satellite coordinate system to the ground coordinate system ;
[0049] And establish restoring force g (η) and unknown disturbance w according to the corresponding situation;
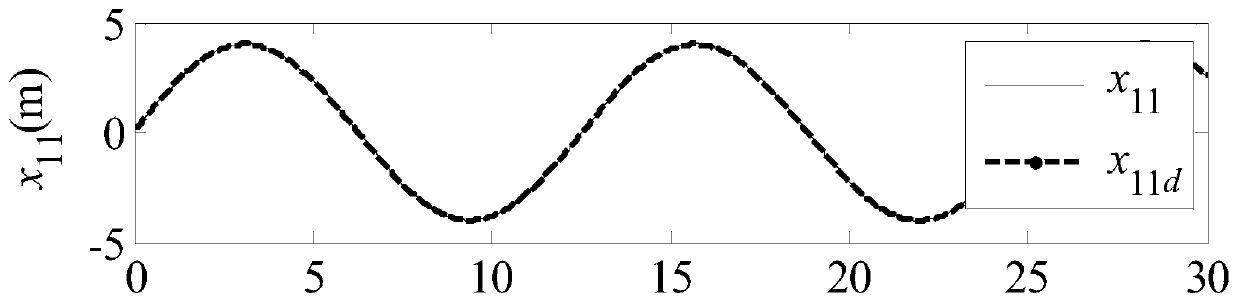
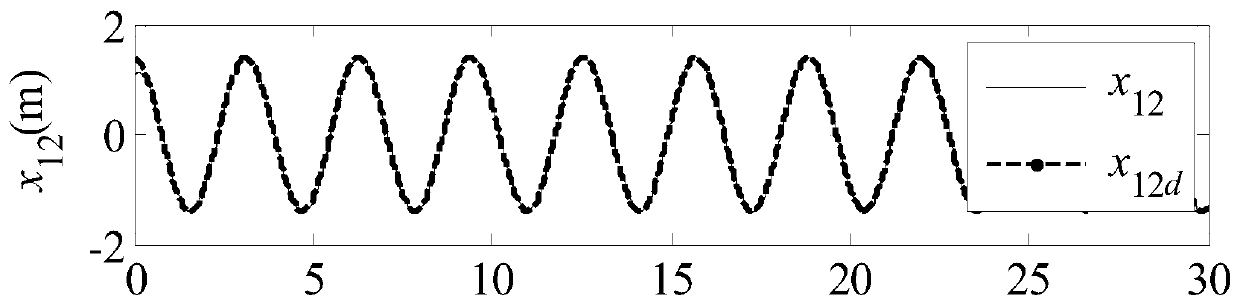
[0050] build the desired trajectory x 1d =[x 11d (t)...
specific Embodiment approach 3
[0063] Specific embodiment three: what this embodiment is different from specific embodiment one or two is that the inertial matrix M of described symmetry positive definite, centripetal force and Coriolis force matrix C (ν), and the expression of damping matrix D (ν) are as follows :
[0064]
[0065]
[0066]
[0067] Among them, m is the mass of the target surface unmanned vehicle, X du is the acceleration coefficient of the longitudinal force with respect to the movement along the x-axis of the body coordinate system, Y dv is the acceleration coefficient of the lateral force with respect to the movement along the y-axis of the body coordinate system, Y dr is the acceleration coefficient of the lateral force with respect to the z-axis rotation of the body coordinate system, x g is the longitudinal position of the center of gravity of the surface unmanned vehicle in the satellite coordinate system, N dr is the acceleration coefficient of the yaw moment with respe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More