

Automatic deviation correction method and system for unmanned ship course control
A technology of automatic deviation correction and heading control, which is applied in the control/adjustment system, two-dimensional position/channel control, non-electric variable control and other directions. The effect of eliminating navigation deviation and improving navigation control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to express the object, technical solution and advantages of the present invention more clearly, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific implementation cases.
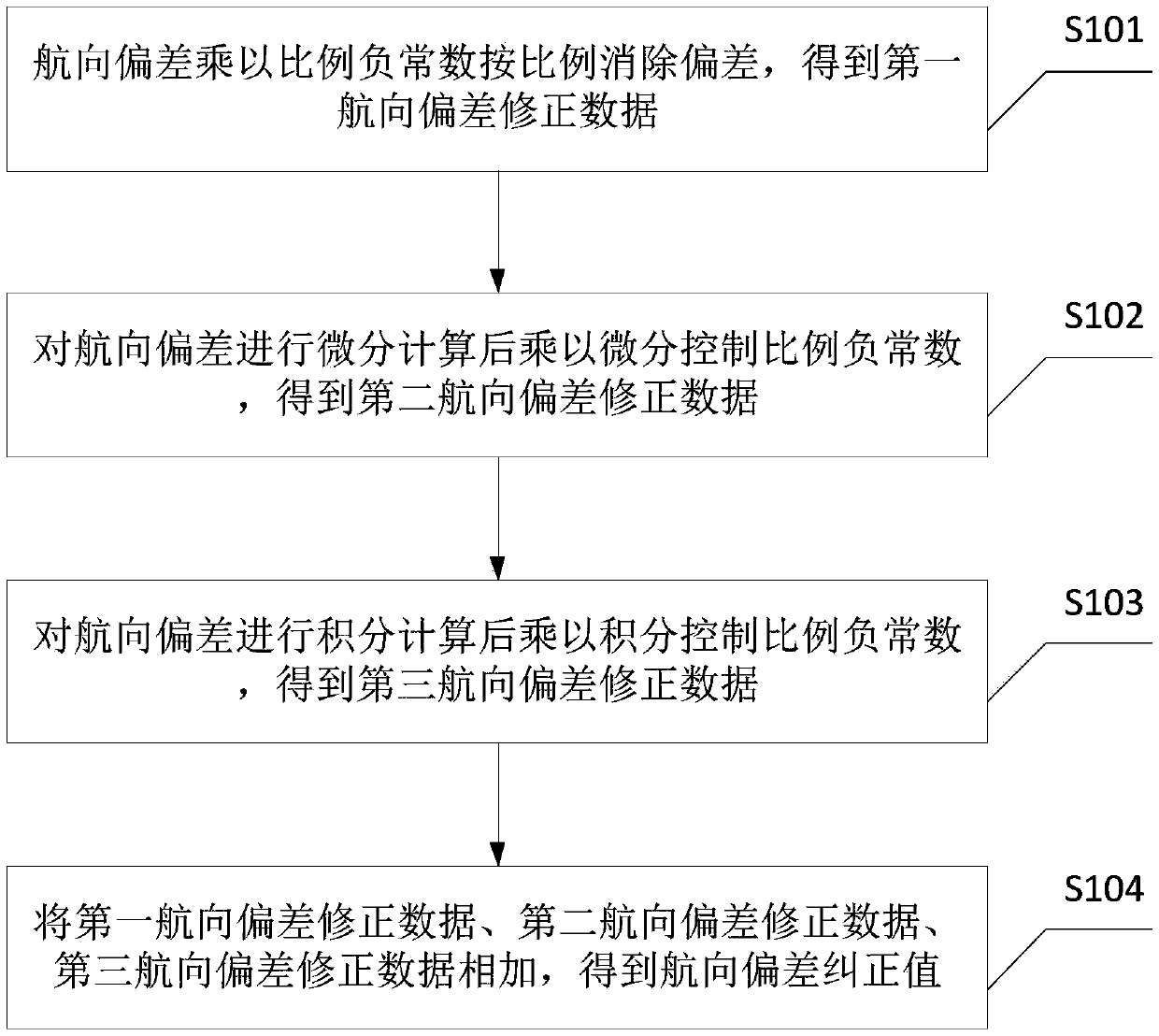
[0020] The automatic deviation correction method for unmanned ship course control of the present invention compensates the course power output through the course deviation correction value, such as figure 1 As shown, the course deviation correction value is calculated in the following way:
[0021] S101. The course deviation is multiplied by a proportional negative constant to eliminate the deviation in proportion to obtain the first course deviation correction data; preferably, including:
[0022] S101-1. Input course deviation data error_course.
[0023] S101-2. Set a proportional negative constant Kp, which is a negative constant for proportionally eliminating the yaw angle deviation data, and its value is preferably [...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More