Two-dimensional coding design method for AGV positioning and navigation
A two-dimensional encoding and design method technology, applied in the fields of information encoding and machine vision recognition, can solve the problems of easy blurring of images, high price, and high cost of inertial navigation, and achieve the effect of fast travel deviation and reduced hardware cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0063] This embodiment provides a two-dimensional code design method for AGV positioning and navigation, including the following:
[0064] 1. The design of coding signs
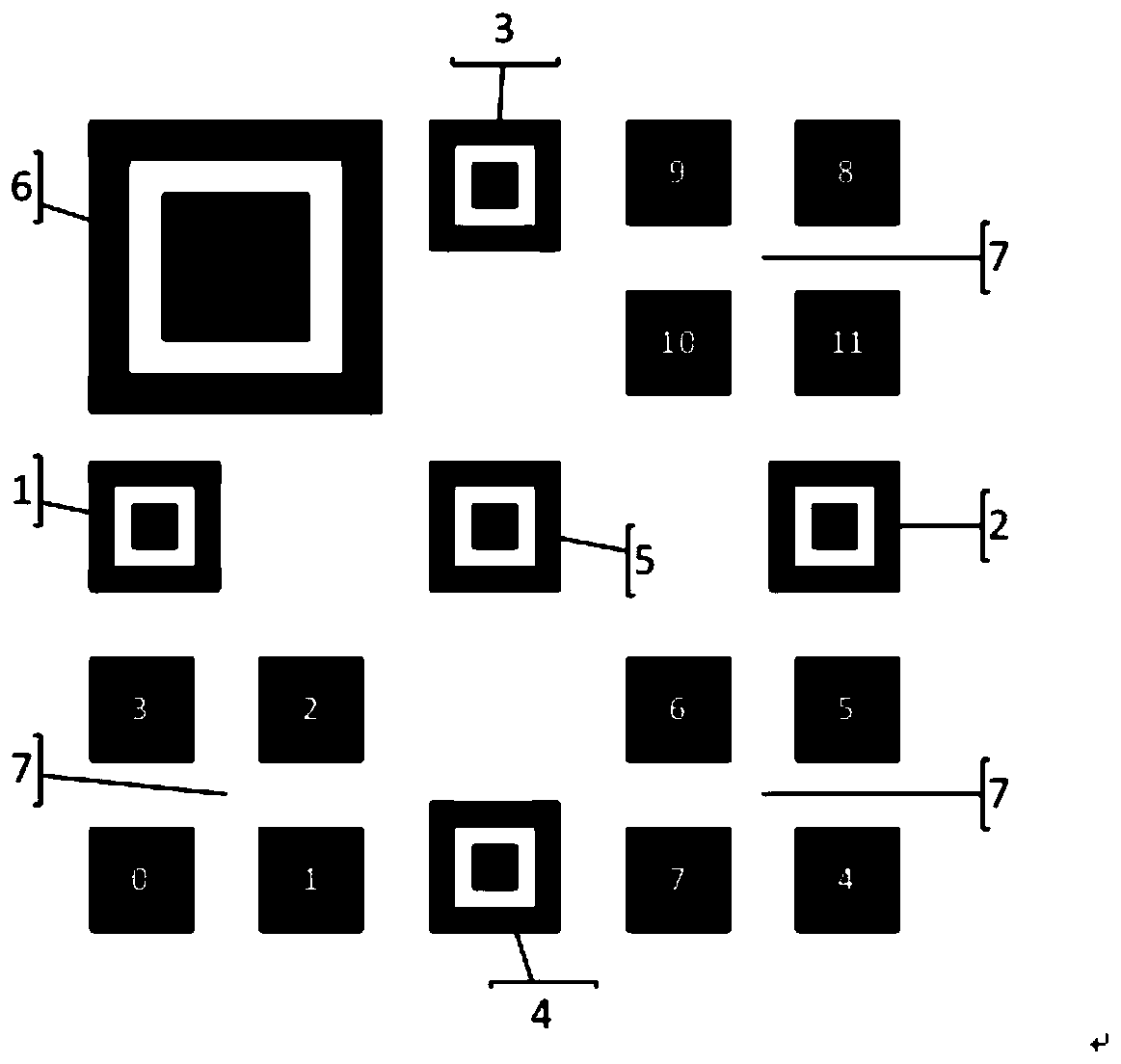
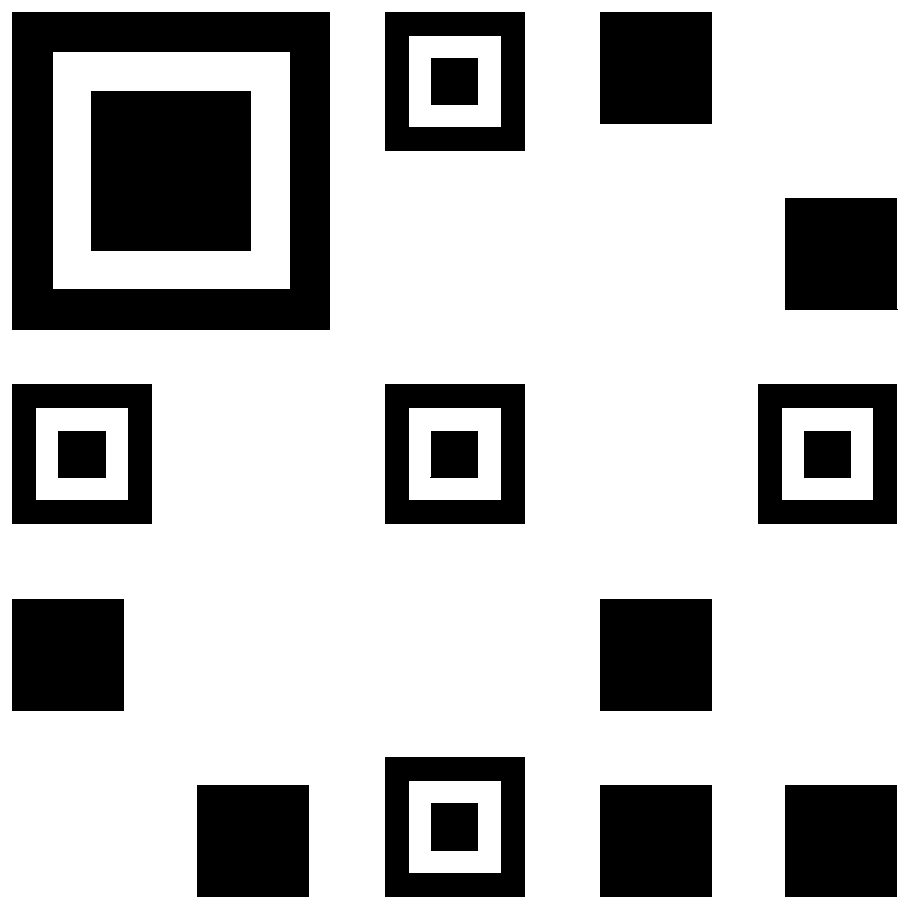
[0065] The coded logo can be quickly identified even if the image is blurred, the coded logo is as attached figure 1 As shown, 1 in the figure represents the first navigation pattern, 2 represents the second navigation pattern, 3 represents the third navigation pattern, 4 represents the fourth navigation pattern, 5 represents the fifth navigation pattern, 6 represents the positioning pattern, 7 denotes an encoding pattern (encoding area). The positioning pattern is rotation invariant. The positioning pattern is placed at any angle, and the progressive scan pattern meets:
[0066] Black border: white border: black border: white border: black border=1:1:3:1:1
[0067] With this feature, progressive scan images can quickly find the registration pattern. The navigation pattern is also rotation invariant, sat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More