

Electric control integrated active force control device and control method thereof
A control method and integrated technology, applied in the direction of manufacturing tools, manipulators, etc., can solve problems such as over-throwing, workpiece or tool damage, rigid contact, etc., to achieve the effects of accurate calculation, improved accuracy, and reduced total volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
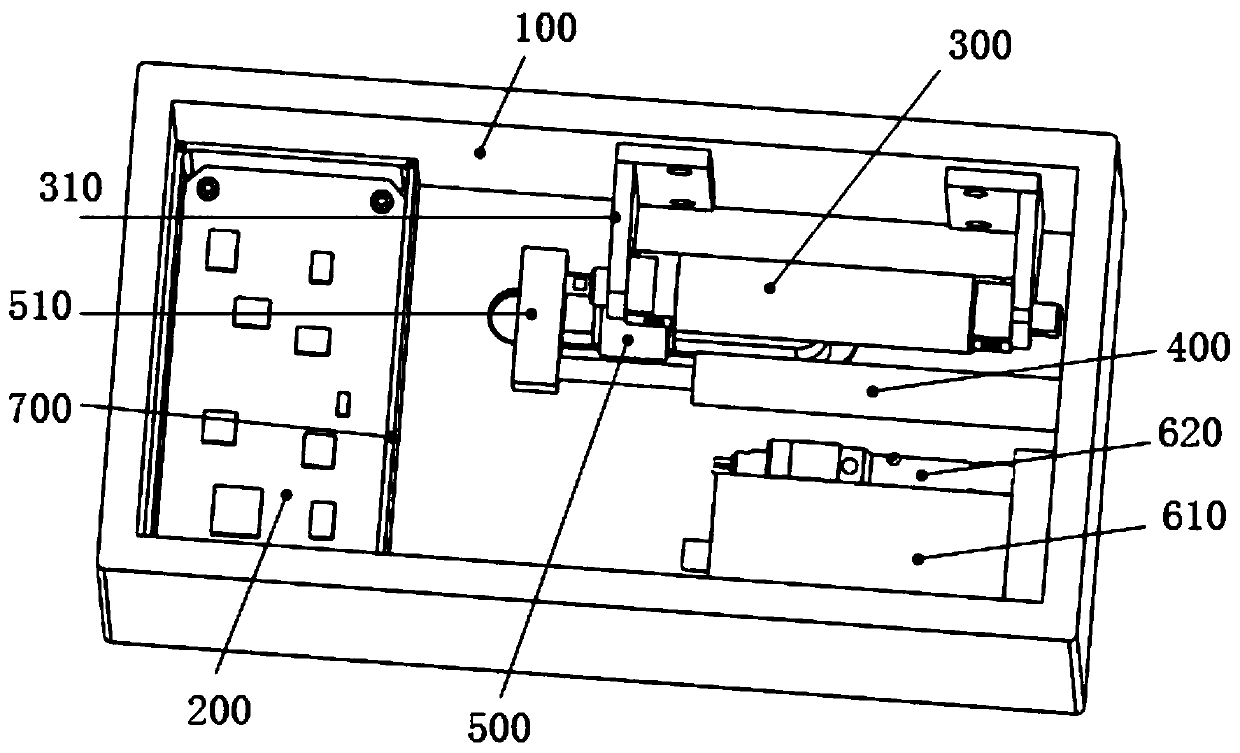
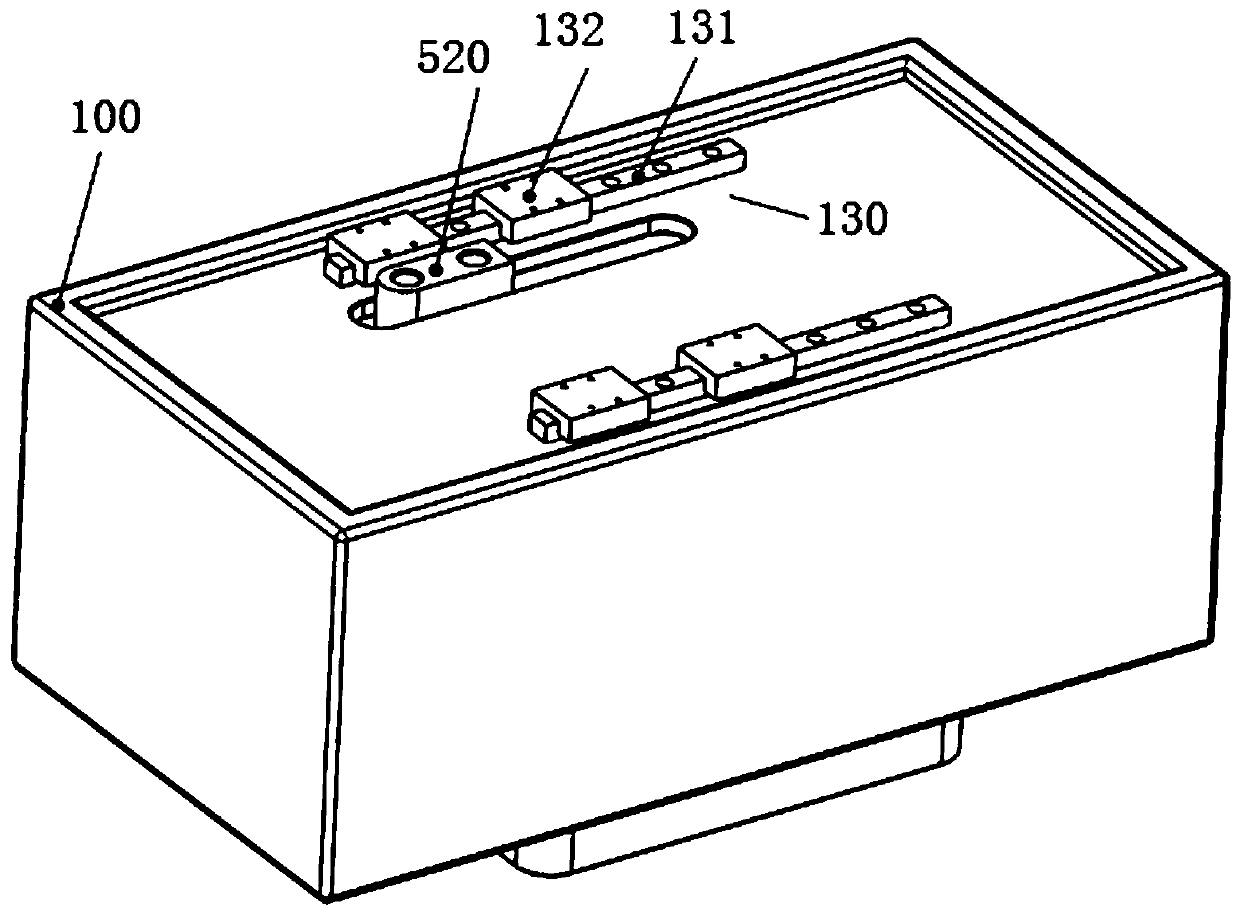
[0038] refer to Figure 1 to Figure 5 , the electronic control integrated active power control device provided by the present invention includes a housing 100, and a control circuit 200, at least one cylinder 300, at least one displacement sensor 400, at least one force sensor 500 and at least one Solenoid valve structure.
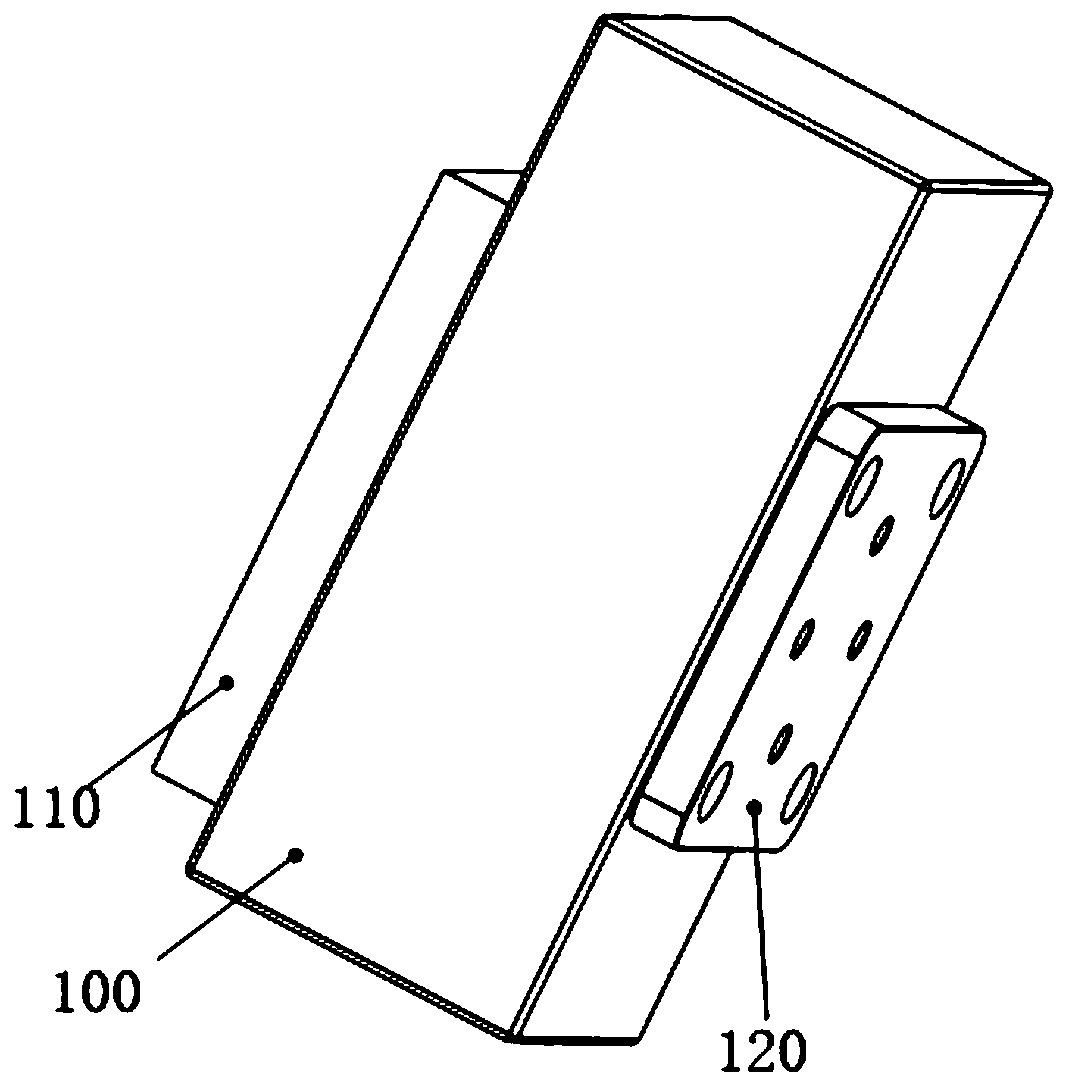
[0039] A first mechanical interface 110 and a second mechanical interface 120 are respectively provided on the upper and lower sides of the housing 100 , the first mechanical interface 110 is used to connect the tool end, and the second mechanical interface 120 is used to connect the robot end.
[0040] The cylinder 300 is specifically a double-acting cylinder, which is detachably fixed on the housing 100 through two cylind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More