An online self-learning multi-joint motion planning method based on neural network
A technology of motion planning and neural network, applied in the direction of neural learning method, biological neural network model, neural architecture, etc., can solve problems such as cumbersome solution process, high difficulty, delay, etc., and achieve high calculation efficiency, low calculation difficulty and short implementation time delayed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
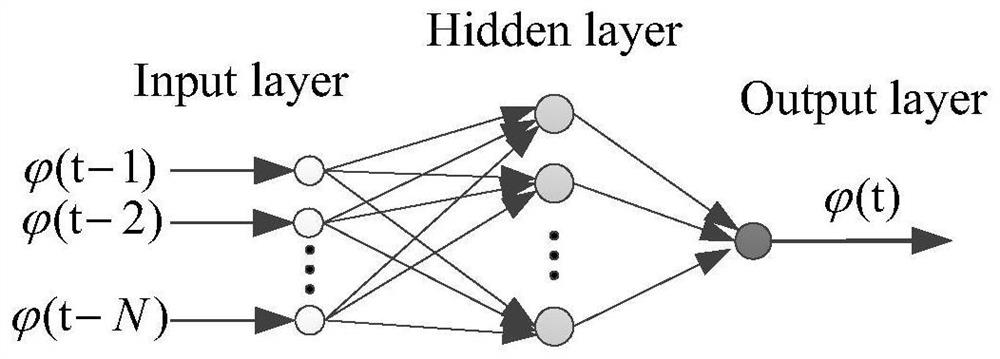
[0037] The neural network method can ignore the specific physical parameters of the process or system, and realize the complex nonlinear mapping between input and output through the learning of training samples, and has good generalization ability. It has the best global approximation performance, and the training method is fast. Easy to implement, there is no local optimum problem. The neural network is used to establish the functional relationship between the trajectory-related information such as joint positions and angles and the trajectory-related information at the previous N moments, so that the trajectory-related information can be predicted.
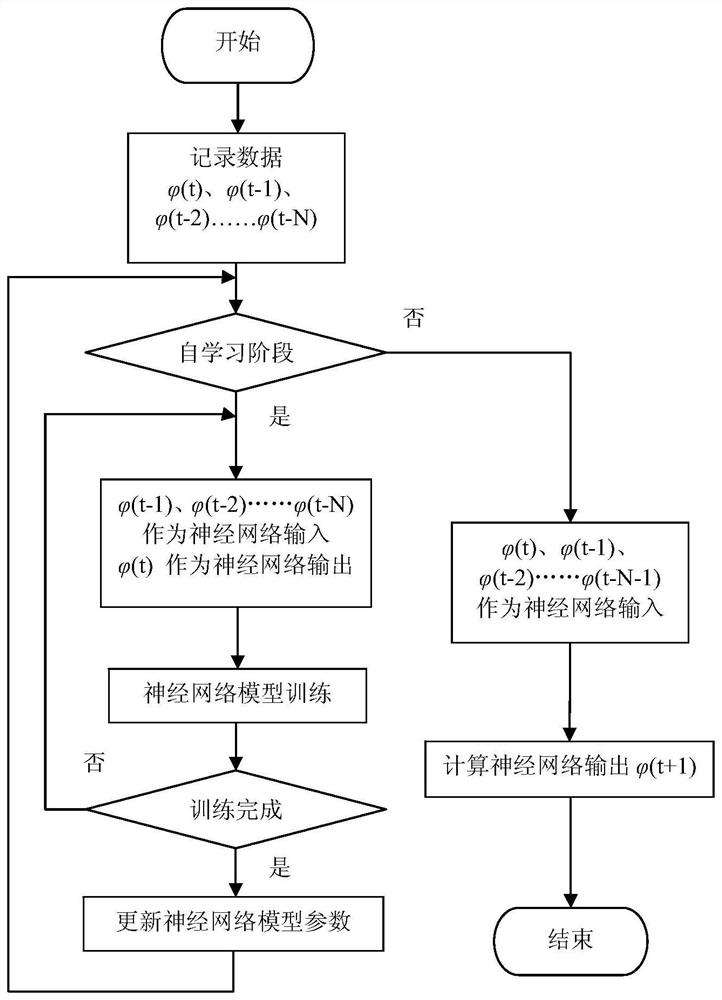
[0038] Specifically, such as figure 1 As shown, the online self-learning multi-joint motion planning method of the present invention is realized through the following steps:
[0039] (1) Collect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More