

Method and device for specifying center of rotation based on optical projection tomography sinogram
An optical projection tomography and sinogram technology, which is used in material analysis, measuring devices, scientific instruments, etc. by optical means, can solve the problems of image artifacts, slow running speed, etc., and achieves the goal of reducing artifacts and improving imaging quality. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
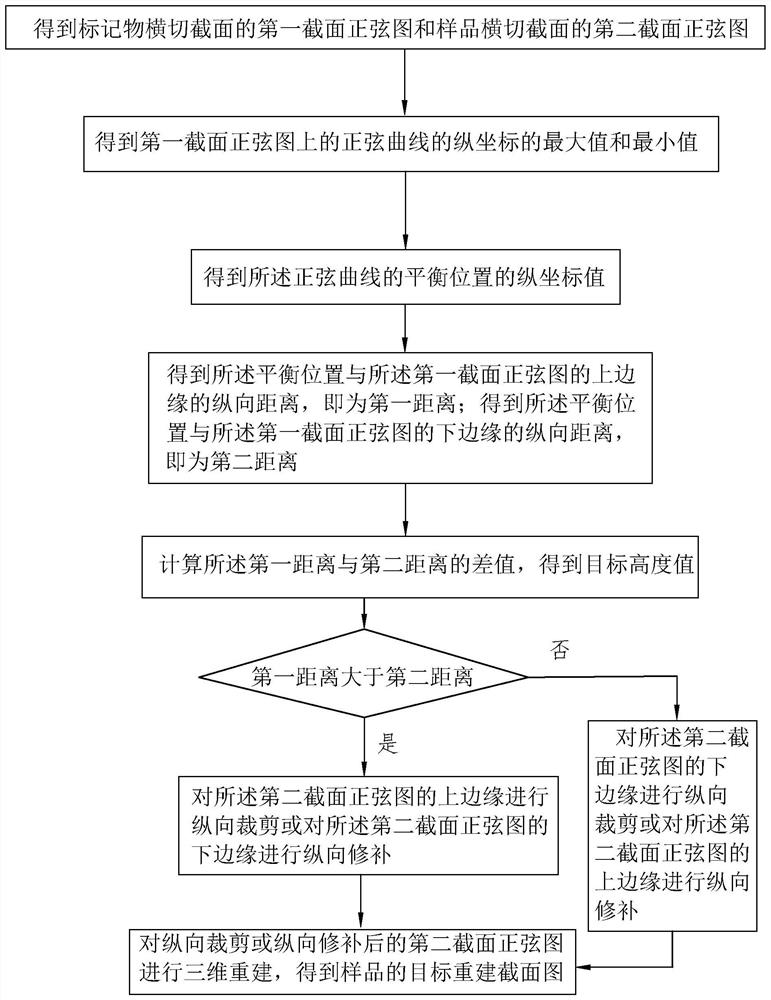
[0049] Embodiment 1, with reference to figure 1, a method for denoting the center of rotation based on an optical projection tomography sinogram, the method comprising:
[0050] The projected centers of rotation of the marker and the sample are the same;
[0051] Obtaining a first cross-section sinogram of the cross-section of the marker and a second cross-section sinogram of the cross-section of the sample;
[0052] Obtain the maximum value and minimum value of the ordinate of the sinusoidal curve on the first section sinogram;
[0053] Obtain the ordinate value of the equilibrium position of the sine curve through the maximum value and the minimum value;
[0054] Obtain the longitudinal distance between the equilibrium position and the upper edge of the first section sinogram, which is recorded as the first distance;
[0055] Obtain the longitudinal distance between the equilibrium position and the lower edge of the first section sinogram, which is recorded as the second ...
specific Embodiment approach
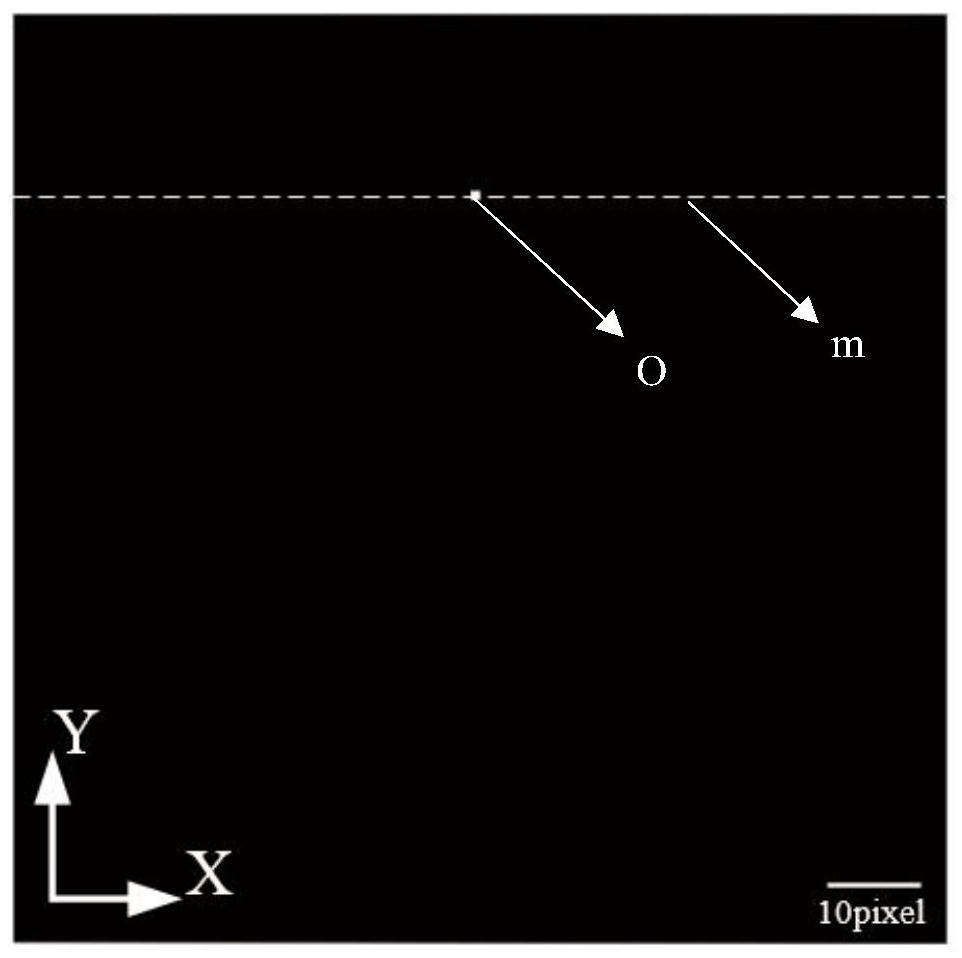
[0076] refer to figure 2 , create a 100*100 zero matrix, and assign a point of the matrix to "1", which is figure 2 Point O in , the cross-section of the simulated marker in this experiment is approximately a point, and the O point is taken as the cross-section of the simulated marker. Among them, the vertical coordinate of point O is a1, and the vertical coordinates of all points on the line m are a1.
[0077] refer to image 3 , performing a radon transformation on the simulated marker, simulating and obtaining projection information at different angles during the 360° rotation of the simulated marker, and obtaining a first simulated sinogram of a cross-section of the simulated marker. After binarizing the first simulated sinogram, use the find function to obtain all the ordinate values of the sinusoidal curve on the first simulated sinogram, and then use the max function and the min function to find the maximum value in these ordinates and the minimum value, by calcu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More