

Campus autonomous patrol robot based on Beidou positioning
A patrol robot and Beidou positioning technology, applied in the field of campus autonomous patrol robots, can solve problems such as no reasonable and effective solutions, inability to monitor dynamics at all times, and inability to provide timely feedback, so as to save labor costs, have good shock absorption effects, and increase flexibility sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] It should be noted that all directional indications (such as up, down, left, right, front, back...) in the embodiments of the present invention are only used to explain the relationship between the components in a certain posture (as shown in the accompanying drawings). Relative positional relationship, movement conditions, etc., if the specific posture changes, the directional indication will also change accordingly.
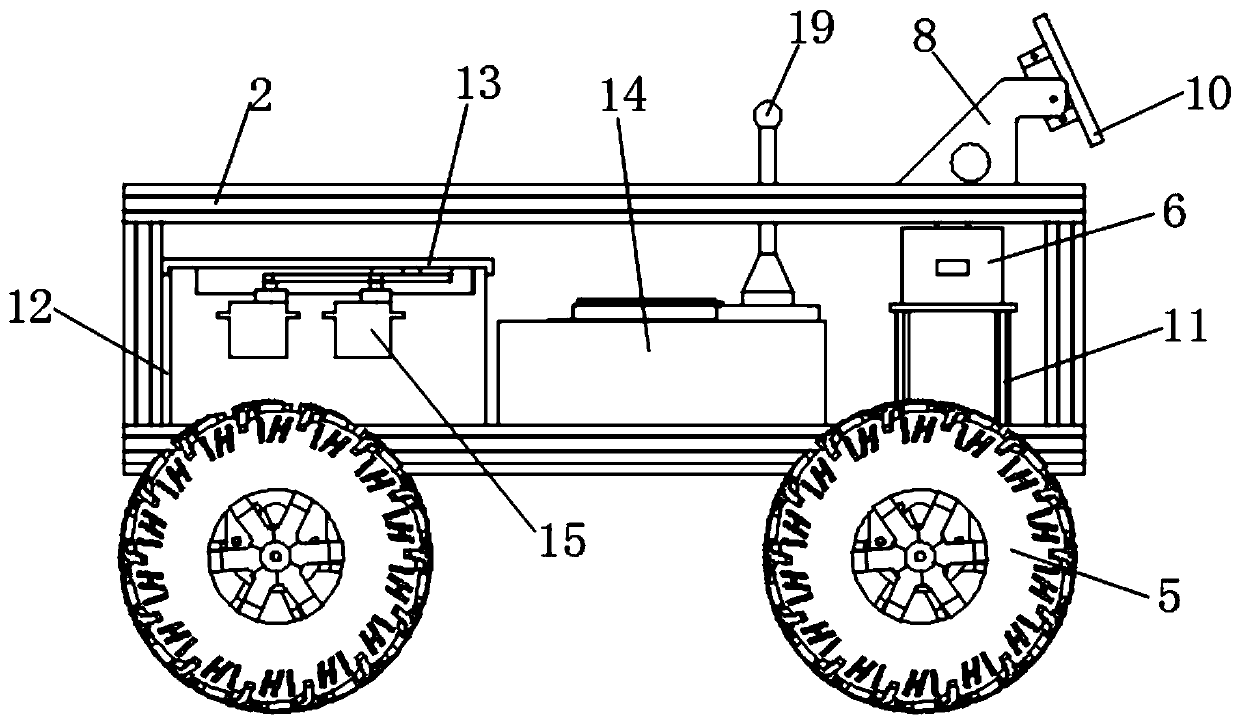
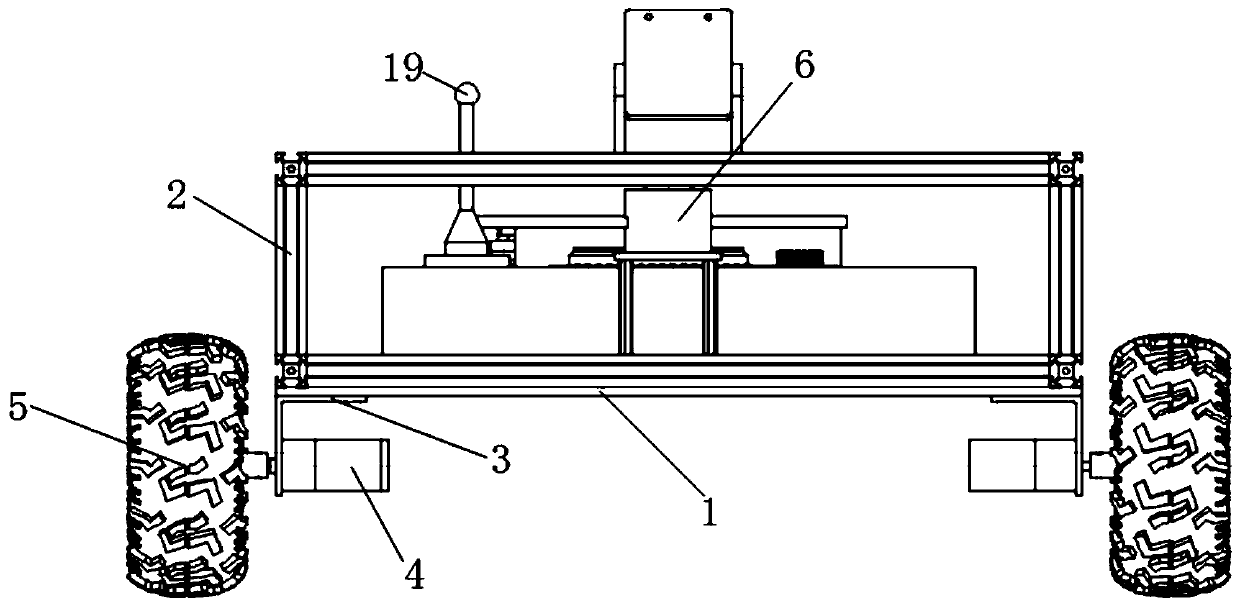
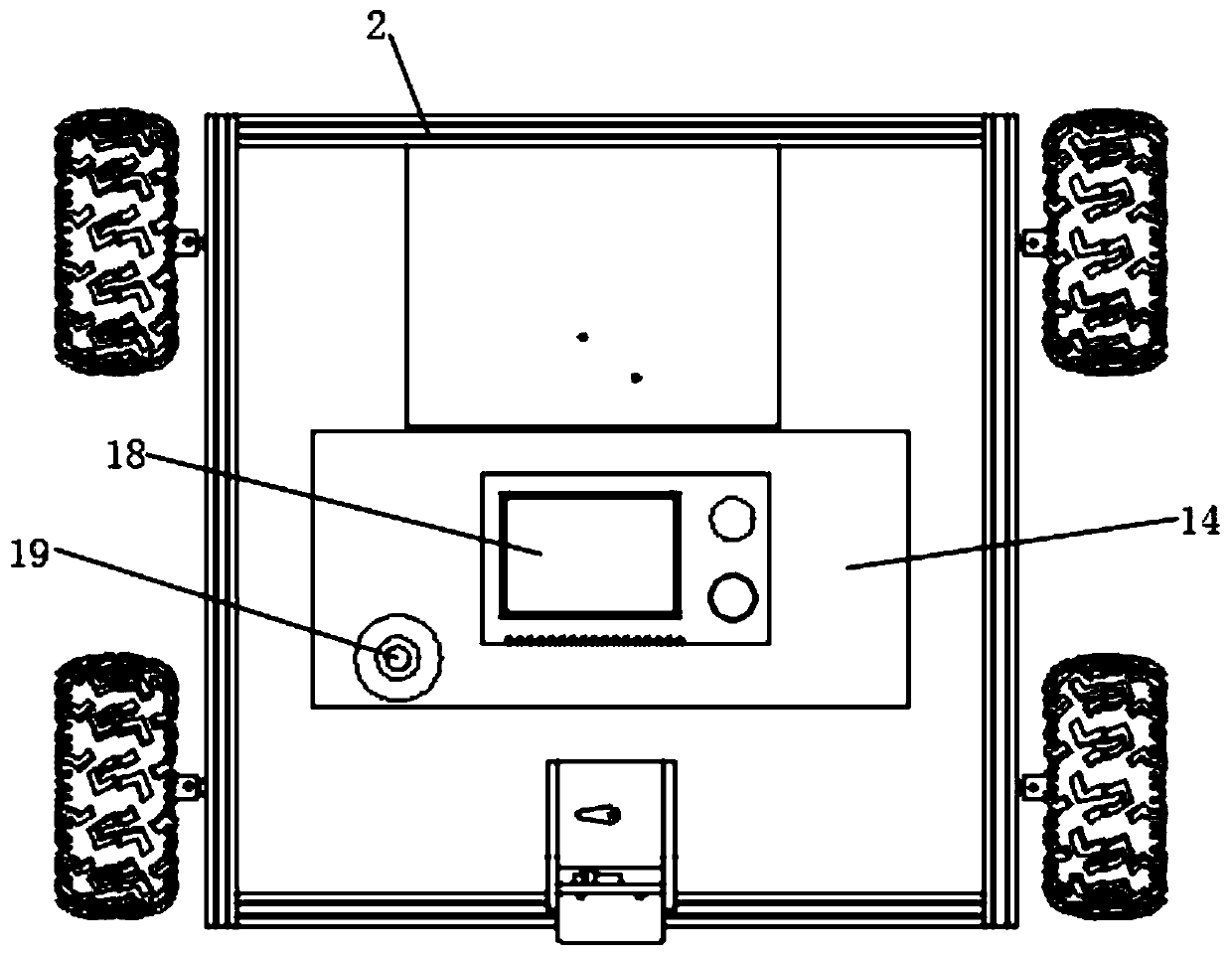
[0033] Such as Figure 1 to Figure 6 As shown, the present invention provides a campus autonomous patrol robot based on Beidou positioning, including an off-road chassis mechanism, a camera pan-tilt mechanism, a four-rotor parking box mechanism and a main control mechanism;
[0034] The off-road chassis mechanism includes a base plate 1 and a square tube frame 2, which are used to fix and protect the overall structure of the robot. The four corners of the bottom of the base plate 1 are respectively fixedly equipped with motor supports 3, and the four mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More