

Puncture robot flexible needle motion path planning device and method based on wolf group algorithm
A wolf pack algorithm and path planning technology, applied in the field of intelligent medical robot control and decision-making, can solve problems such as poor accuracy, large amount of calculation and complexity, difficult path planning, etc. The effect of global convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The technical solutions of the present invention will be described below in conjunction with the drawings and embodiments.
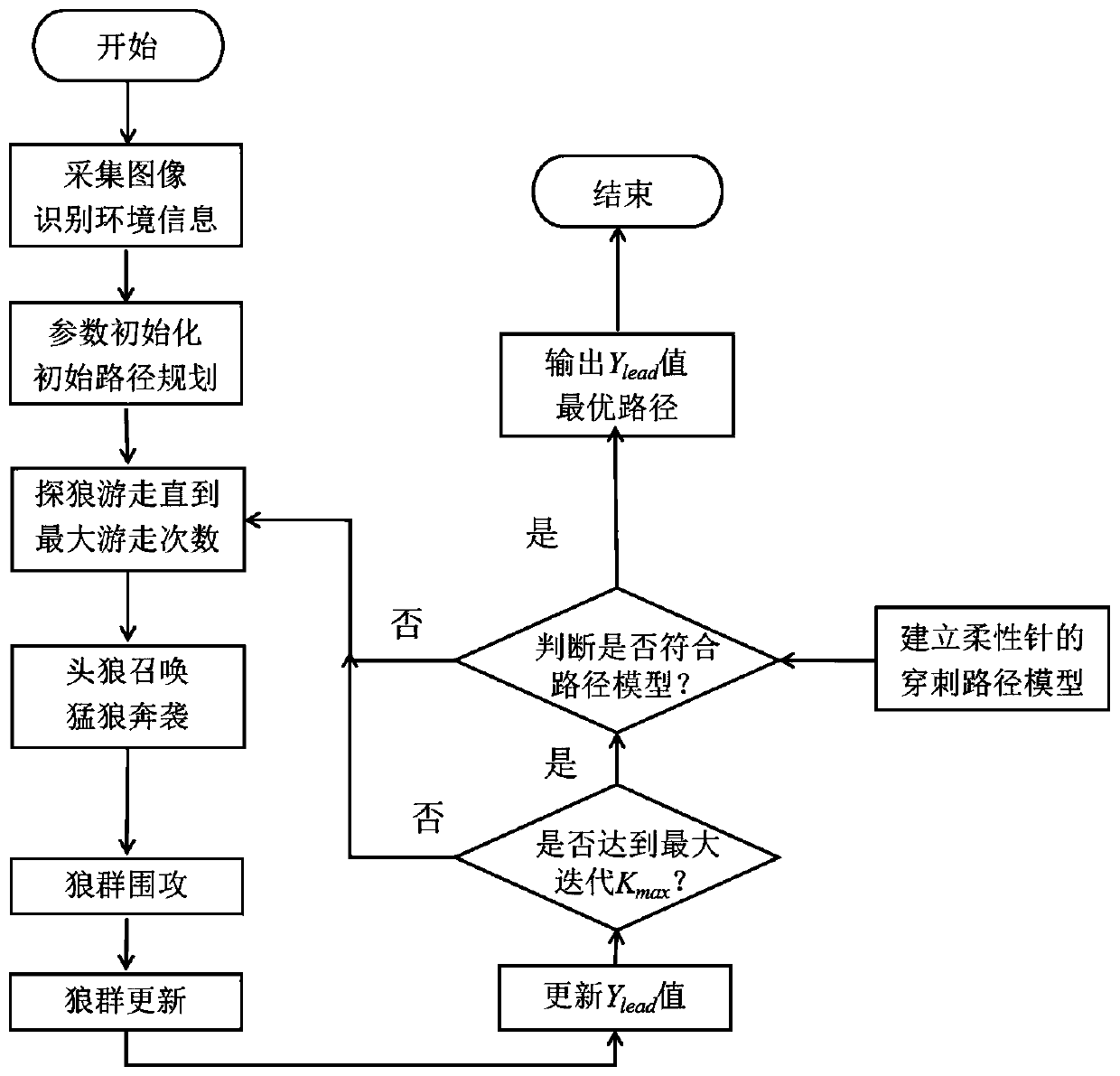
[0047] The method for planning the motion path of the flexible needle of the puncture robot based on the wolf pack algorithm implemented by the present invention first obtains the image of the puncture environment through the image collector, and determines the positions of the target point and the obstacle from the image; and then performs the following steps 1 to 8 , a process implemented such as figure 1 shown.
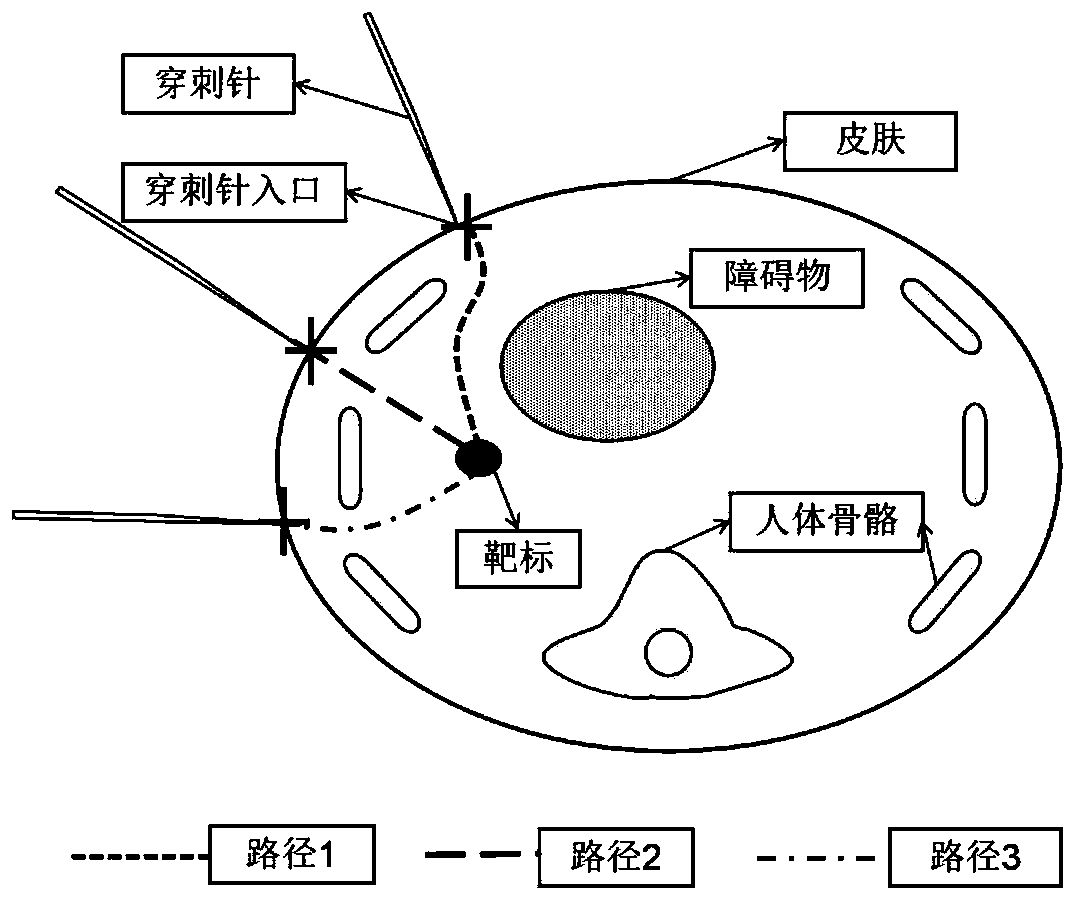
[0048] Step 1: Establish the puncture path model of the flexible needle.
[0049] The path geometry forms of the flexible needle during the puncture process are mainly divided into three types: straight line path, arc path, and multi-segment compound path, as shown in 2. Straight path such as figure 2 As shown in path 2 in , it is a two-point line from the entrance of the puncture needle to the target with no obstacles in the middl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More