

Small unmanned helicopter fixed-height control method based on reinforcement learning
An unmanned helicopter and enhanced learning technology, which is applied in the field of intelligent control of indoor small unmanned helicopter altitude control, can solve the problems of flight altitude change, general control effect, and drift interference in the stable state of the fuselage, and achieve the effect of improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
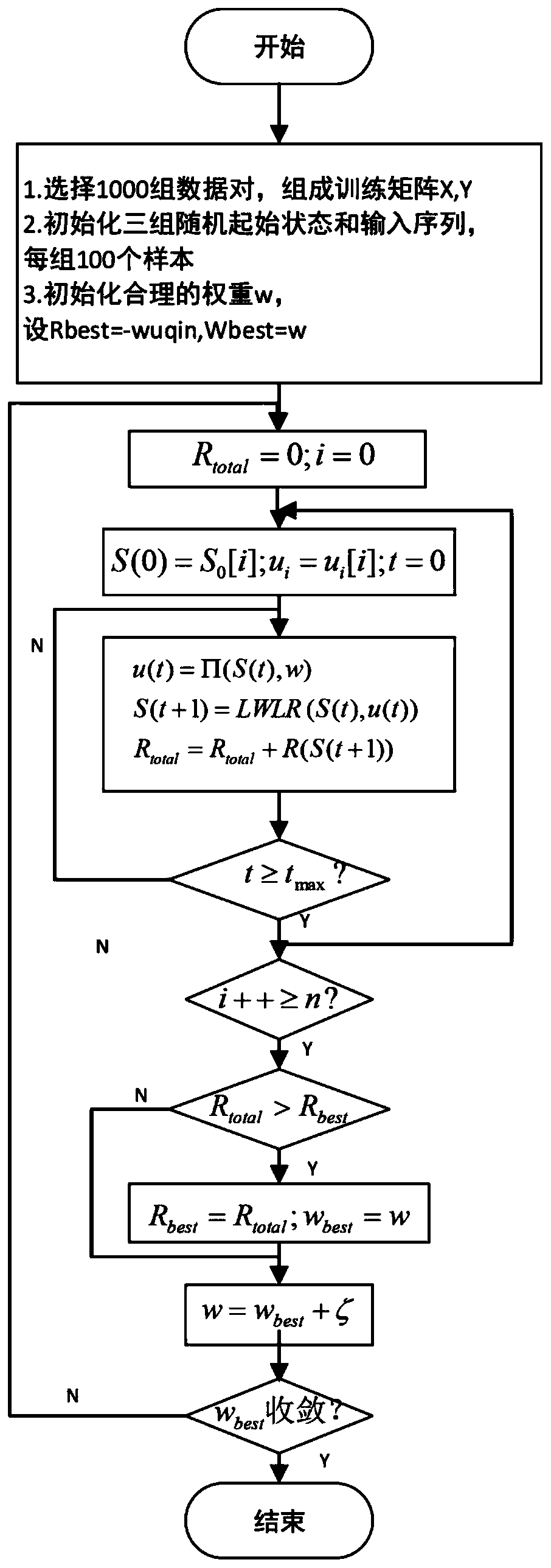
[0039]In the existing reinforcement learning control cases, the controlled objects are mostly medium-sized helicopters, and most of them are controlled outdoors. The present invention aims to provide a continuous control method based on off-line reinforcement learning to realize the fixed-altitude flight of a small unmanned helicopter in an indoor positioning environment under the condition of external disturbance. The technical scheme adopted by the present invention is to first construct a helicopter model and a reward function based on a Markov sequence, then use a random approximation method to train and iterate to obtain optimized controller parameters, and finally bring the trained controller into a real helicopter system authenticating. Include the following steps:
[0040] Step 1) Define the Markov decision process:
[0041] Markov methods are widely used in many sequential decision-making problems. The main concepts are decision time, system state, behavior, reward ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More