

Highway inspection system and method based on track type inspection robot
A technology for inspection robots and highways, which is applied in the traffic control system of road vehicles, traffic control systems, control/regulation systems, etc., and can solve problems such as high labor costs and poor real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
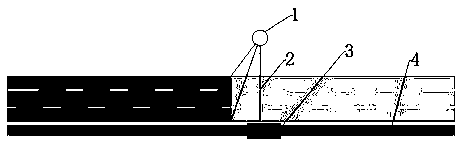
[0056] refer to figure 1 and figure 2 , a highway inspection system based on a track-type inspection robot, including a track 4 laid along the length of the expressway, a track-type inspection robot 3 installed on the track, a communication system and a control station.
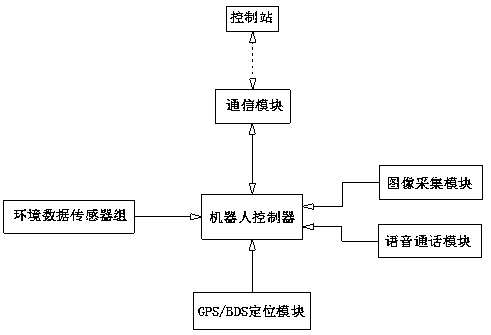
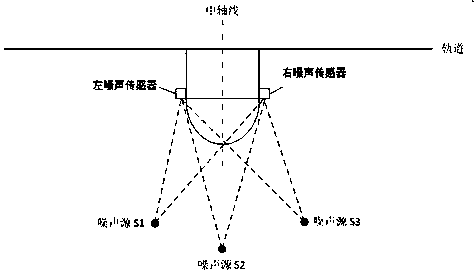
[0057] The orbital inspection robot includes a robot controller, GPS / BDS positioning module, environmental data sensor group, voice call module, pan / tilt, and image / video acquisition module installed on the pan / tilt; GPS / BDS positioning module and image / video acquisition The modules are respectively connected with the signal input of the robot controller; the environmental data sensor group includes a noise sensor connected with the signal input of the robot controller; the orbital inspection robot has two noise sensors, and the two noise sensors are about The central axis of the orbital inspection robot is symmetrically installed on the left and right sides of the orbital inspection robot, and the central ...
specific Embodiment approach 2
[0074] Due to the relatively closed space in the tunnel, the noise is more obvious after the traffic accident, and the ambient temperature rises significantly after the fire. This specific implementation makes the following improvements to the highway inspection system based on the track-type inspection robot in Embodiment 1. To better apply to accidents in expressway tunnels:
[0075] The traffic accident identification procedure is carried out in the following steps:
[0076] a1: Analyze the noise data in the environmental data, and judge whether the current environmental noise exceeds the accident noise threshold; if so, go to step a2; if not, repeat step a1:
[0077] a2: Judging the location of the accident according to the noise source and the current location of the track-type inspection robot, and generating a control command to control the track-type inspection robot to move to the traffic accident scene collection location;
[0078] In step a2, locate the noise and c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More