Data-driven mechanical arm repetitive motion control method and device
A repetitive movement and control method technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as damage to the manipulator, unknown load of the manipulator, and unknown structure of the manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings.
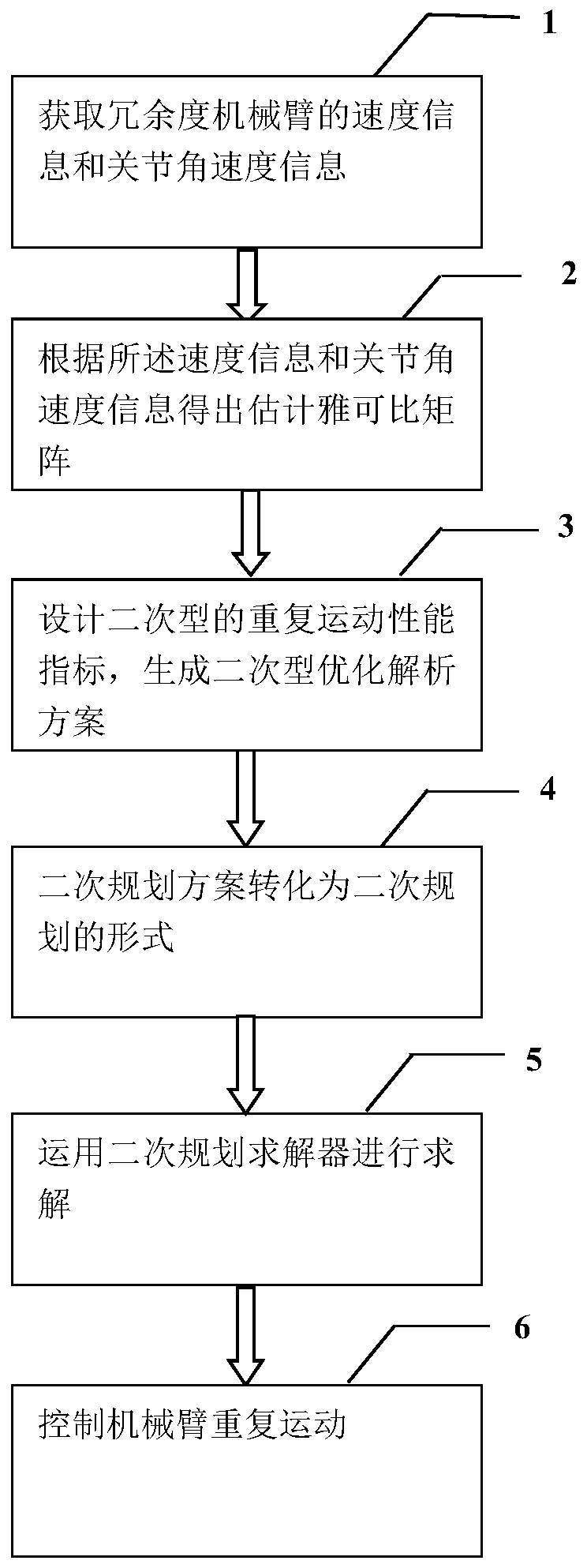
[0039] figure 1 is the flow chart of the present invention; obtain the speed information and joint angular velocity information of the redundant manipulator; then obtain the estimated Jacobian matrix according to the speed information and the joint angular velocity information; then design the quadratic repetitive motion performance index to generate Quadratic optimization analysis scheme; then transform the quadratic programming scheme into the form of quadratic programming; then use the quadratic programming solver to solve; finally, the lower computer controller controls the motion of the redundant manipulator according to the solution result.
[0040] figure 2 The redundant manipulator for realizing the present invention is a Sawyer manipulator with seven degrees of freedom in space. The redundant manipulator is composed of seven links, through joint one (1), jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com