

Foot landing determination method and device based on six-axis sensor
A technology of six-axis sensor and determination method, applied in directions such as navigation through speed/acceleration measurement, can solve problems such as low reliability, and achieve the effect of improving accurate detection and solving low reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0030]According to an embodiment of the present invention, a method embodiment of a foot landing determination method based on a six-axis sensor is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be performed on a computer such as a set of computer-executable instructions. system, and, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
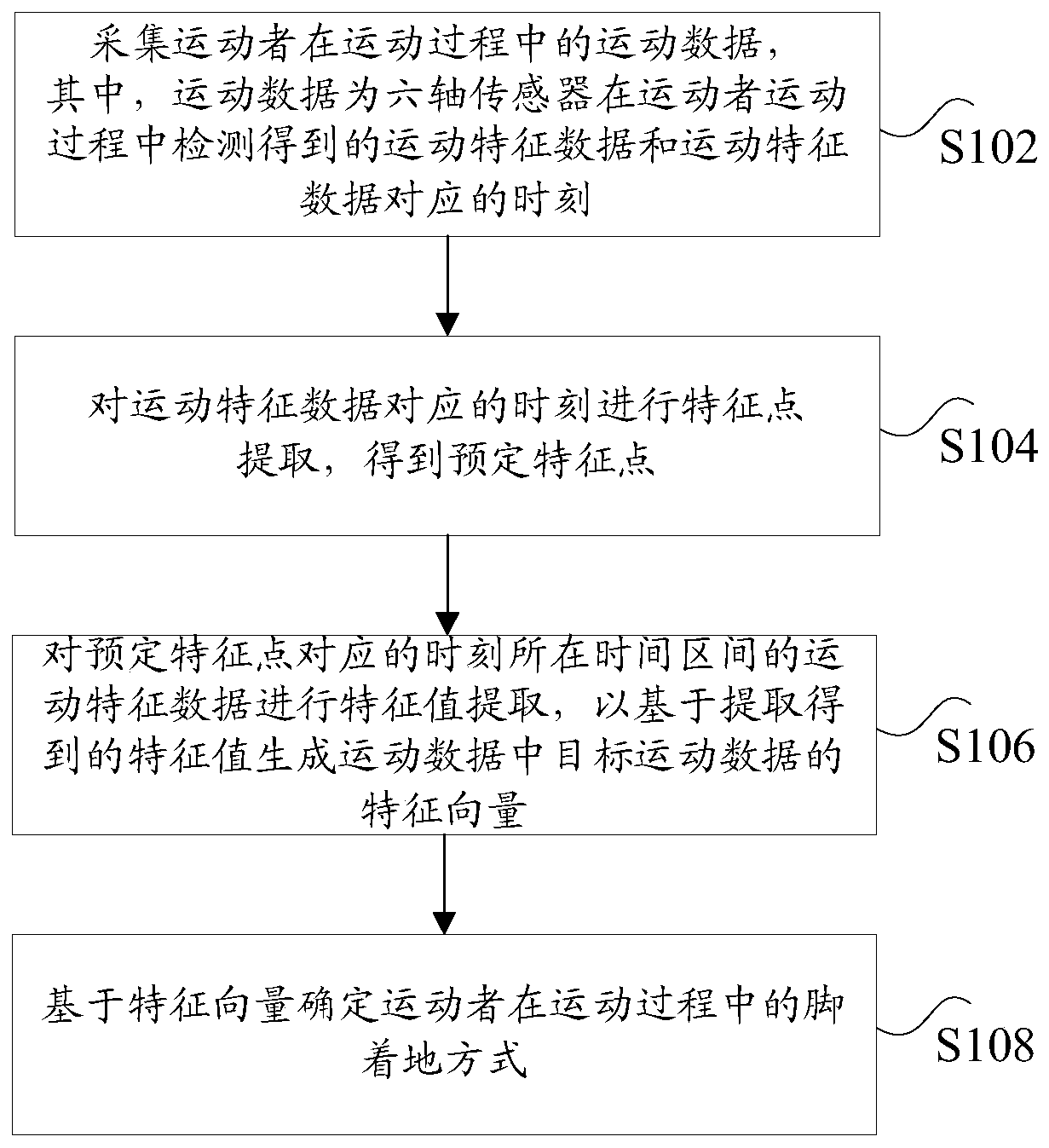
[0031] figure 1 is a flowchart of a method for determining foot landing based on a six-axis sensor according to an embodiment of the present invention, such as figure 1 As shown, the foot landing determination method based on the six-axis sensor includes the following steps:
[0032] Step S102, collecting motion data of the athlete during the exercise, wherein the motion data is the motion feature data detected by the six-axis sensor during the motion of the athlete and t...
Embodiment 2
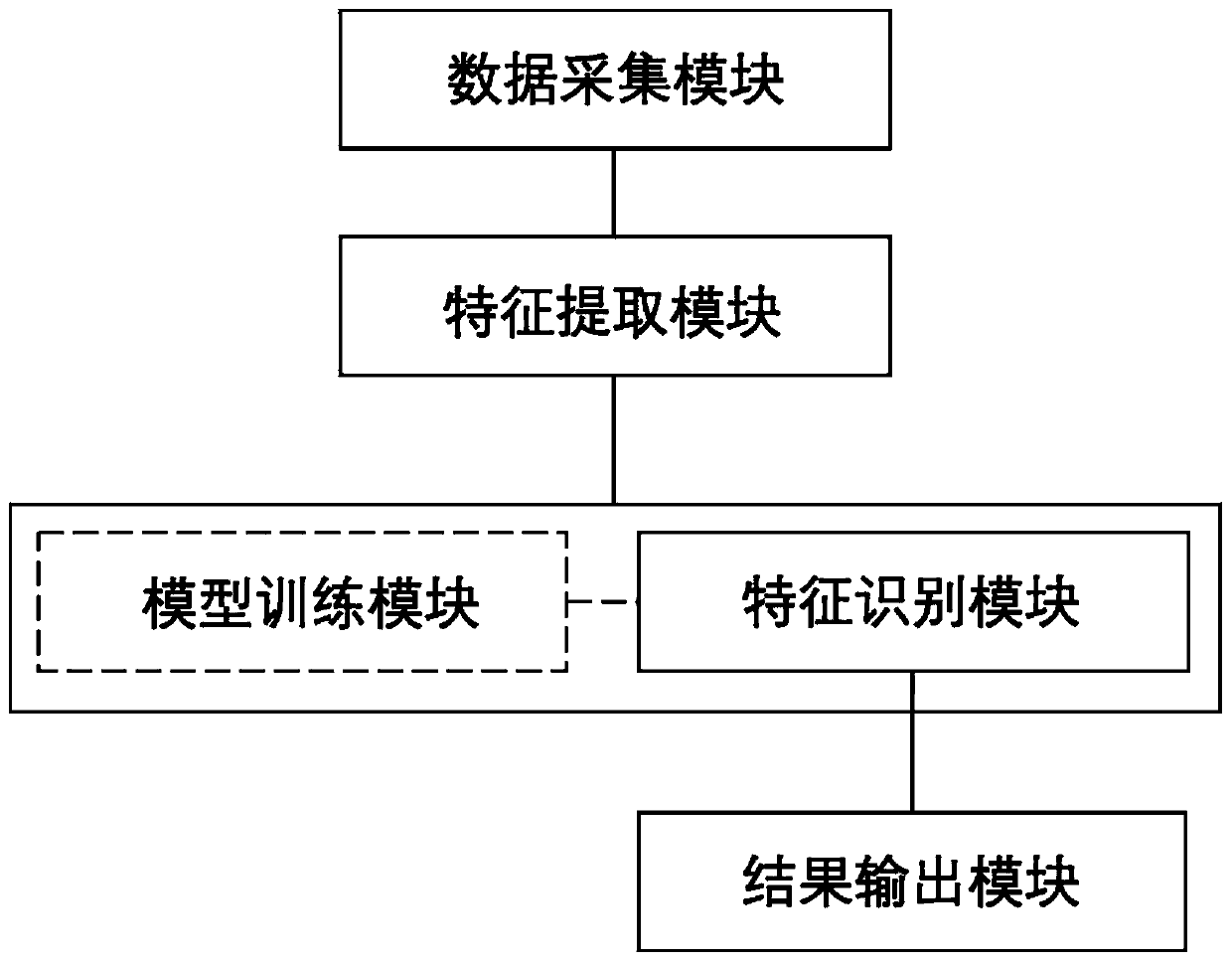
[0052] According to another aspect of the embodiments of the present invention, a device for determining foot landing based on a six-axis sensor is also provided, Figure 4 is a schematic diagram of a device for determining foot landing based on a six-axis sensor according to an embodiment of the present invention, such as Figure 4 As shown, the device for determining foot landing based on a six-axis sensor includes: an acquisition unit 41 , an extraction unit 43 , a generation unit 45 and a determination unit 47 . The device for determining the foot landing based on the six-axis sensor will be described in detail below.
[0053] The collection unit 41 is used to collect motion data of the athlete during the exercise, wherein the motion data is the motion feature data detected by the six-axis sensor during the motion of the athlete and the time corresponding to the motion feature data.
[0054] The extraction unit 43 is configured to extract feature points at the time corres...
Embodiment 3
[0066] According to another aspect of the embodiments of the present invention, a storage medium is further provided, and the storage medium includes a stored program, wherein the program executes any one of the methods for determining foot landing based on a six-axis sensor described above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More