

Multi-unmanned aerial vehicle target tracking phase angle correction method based on orbital transfer method
An unmanned aerial vehicle and orbit transformation technology, which is applied in the field of target tracking of unmanned aerial vehicles, can solve the problems of many degrees of freedom in planning parameters, large calculation load of onboard computer, high complexity of algorithm, etc., and achieve simple and practical correction method, relatively The effect of high corner correction efficiency and high tracking efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0070] In this embodiment, three unmanned aerial vehicles cooperatively track a target as an example for simulation.
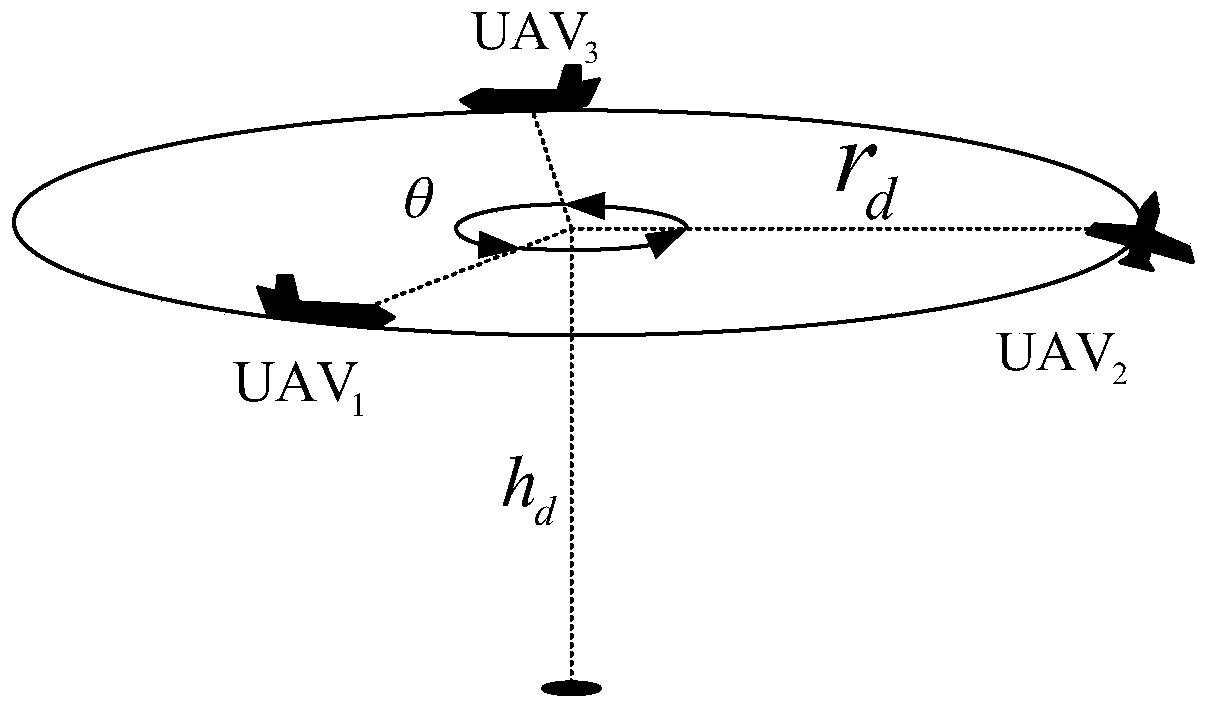
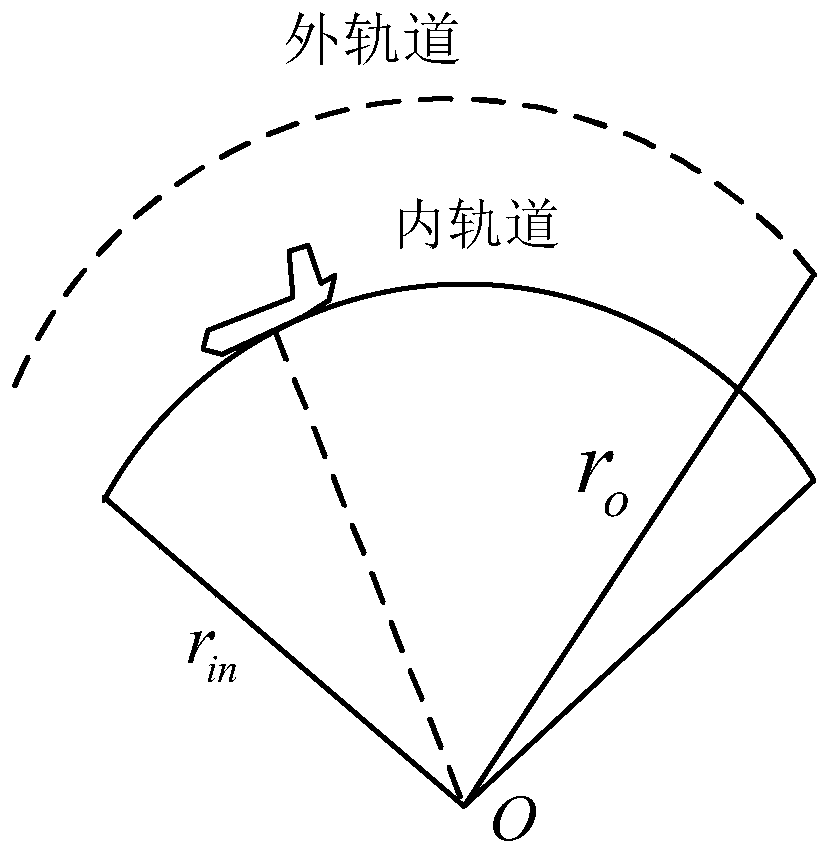
[0071] The initial simulation conditions are: the position of the tracked target is (0,0,0), and the target circle is located at the height h above the target d =500m, target circle radius r d =500m, inner track radius r in = r d =500m, outer track radius r o = 1000m, the initial positions of the three UAVs are respectively The flight speed of the UAV is v o = 50m / s.
[0072] The Lyapunov vector field method is used to guide each UAV from its initial position to the outer orbit. From Figure 10 and Figure 11 It can be seen that the three UAVs start from their respective starting positions, and under the guidance of the Lyapunov vector field, fly to the outer orbit to circle and track the tracked target.
[0073] In order to correct the phase angle, it is necessary to set a time reference. When the simulation is carried out in this embodiment, the depa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More