

Establishment method and control method of mechanical model of soft manipulator
A technology of soft machinery and mechanical models, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to solve problems such as inability to precisely control spatial motion posture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but the present invention may be implemented in a variety of different ways defined and covered below.
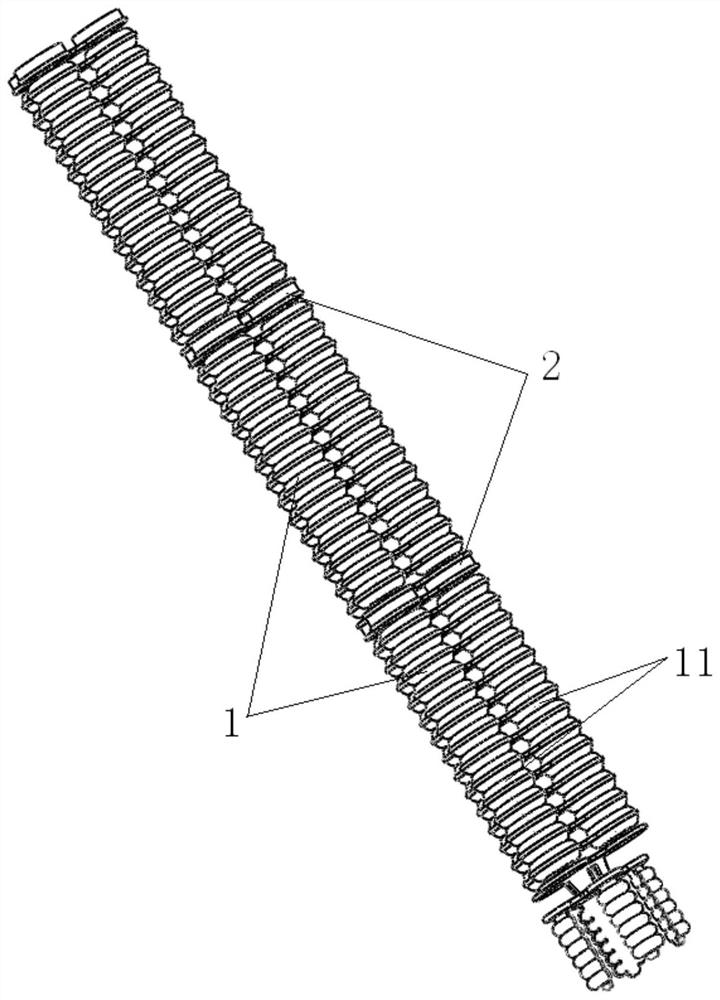
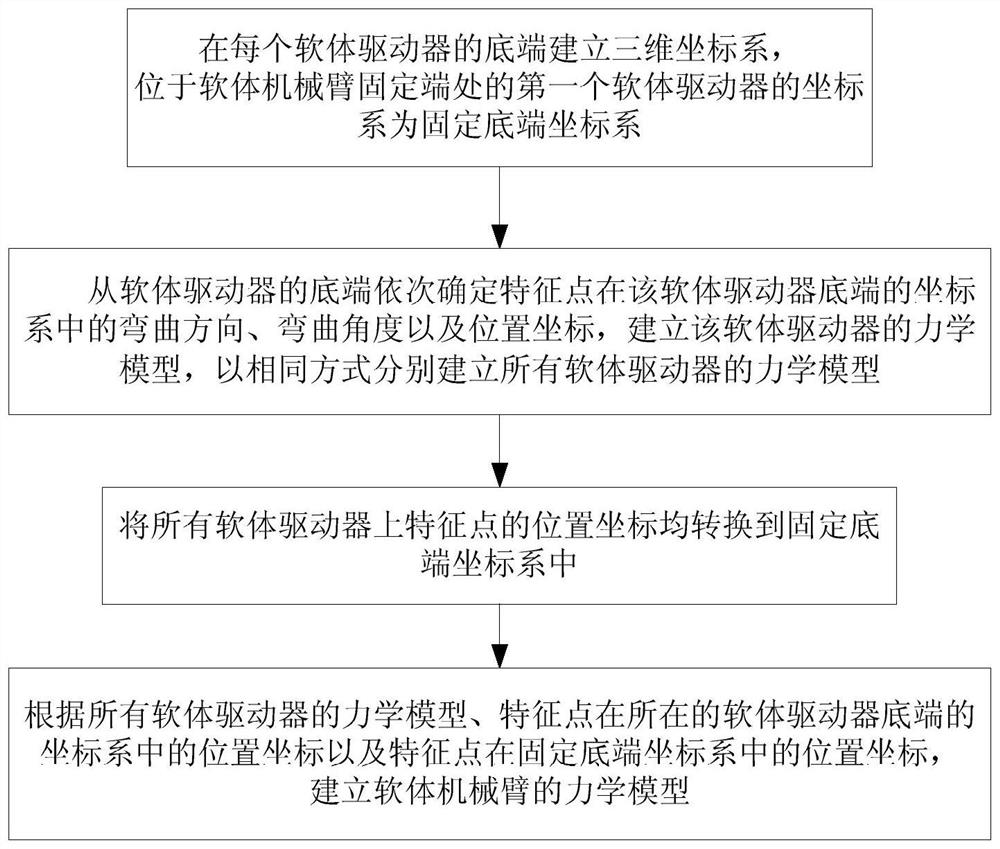
[0033] figure 1 It is a schematic diagram of the structure of the soft robotic arm of the preferred embodiment of the present invention; figure 2 It is a schematic flow diagram of a mechanical model of a soft manipulator in a preferred embodiment of the present invention.
[0034] Such as figure 1 with figure 2 As shown, the method for establishing the mechanical model of the soft manipulator of this embodiment is used to obtain the spatial position and spatial attitude of the soft manipulator to control the movement of the soft manipulator. The soft manipulator includes M software drivers 1, and the software The driver 1 is sealed from the end to the end in the axial direction through the connecting structure 2. The soft driver 1 includes a plurality...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More