

Two-degree-of-freedom hybrid stepping motor with orthogonal cylindrical structure for robots
A technology of stepping motors and degrees of freedom, applied in the direction of electromechanical devices, electric components, magnetic circuit shape/style/structure, etc., can solve the problems of large overall volume and weight of the motor, high open-loop positioning accuracy, and difficult processing technology, etc. Achieve the effects of high mechanical integration and material utilization, simplified electromagnetic calculation and performance analysis, and simple mechanical connection structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
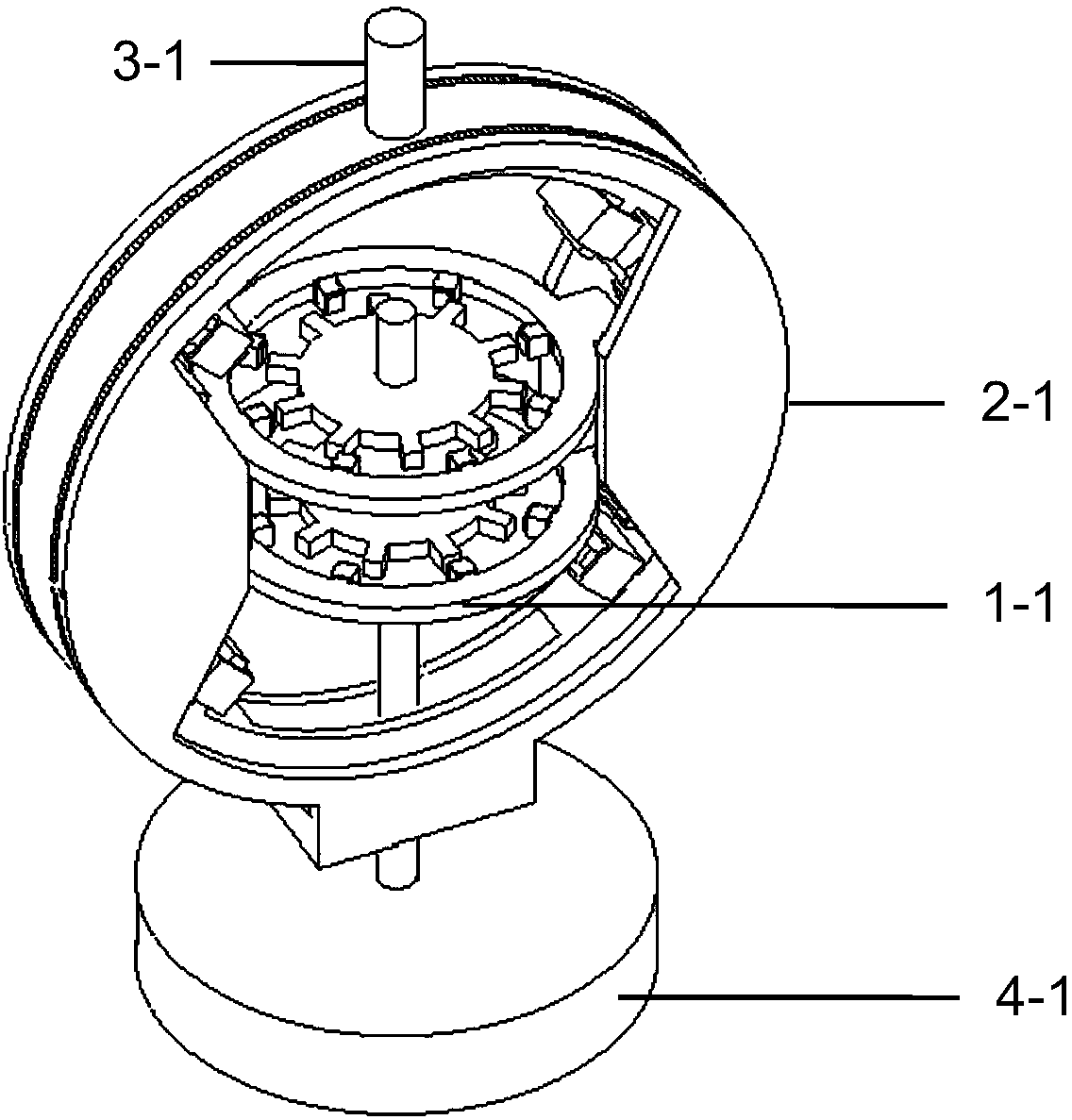
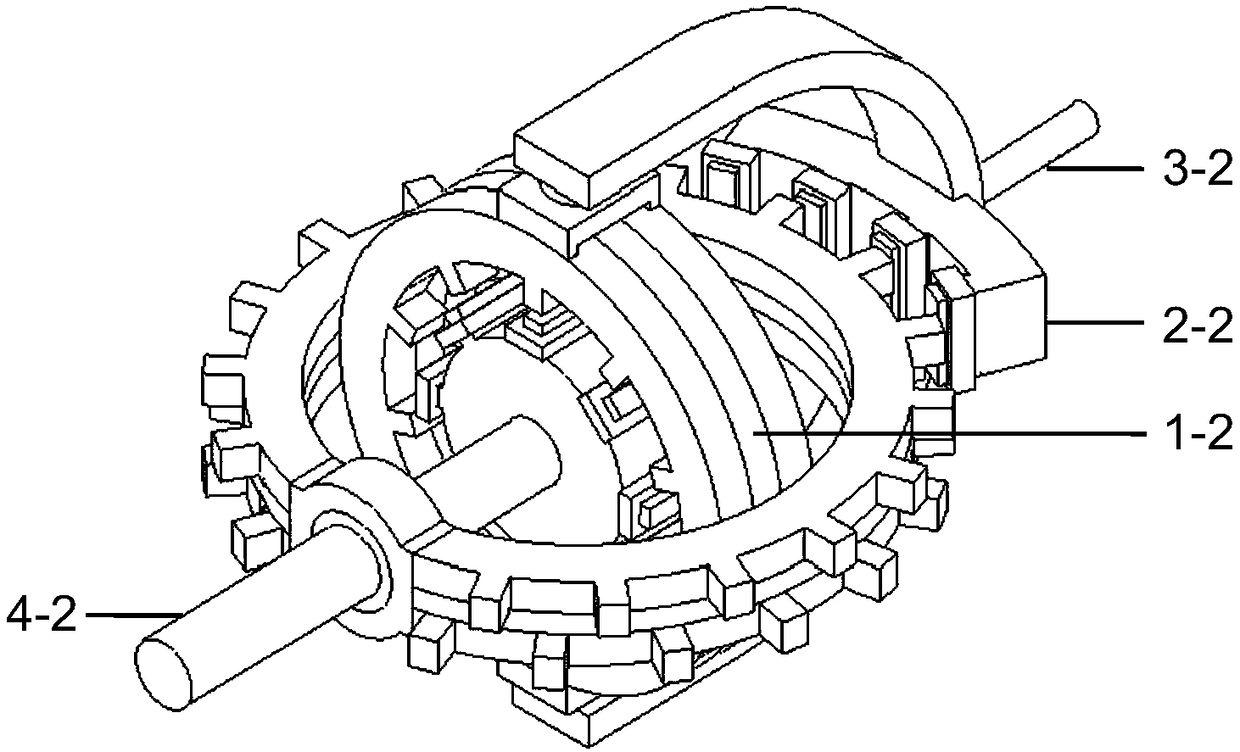
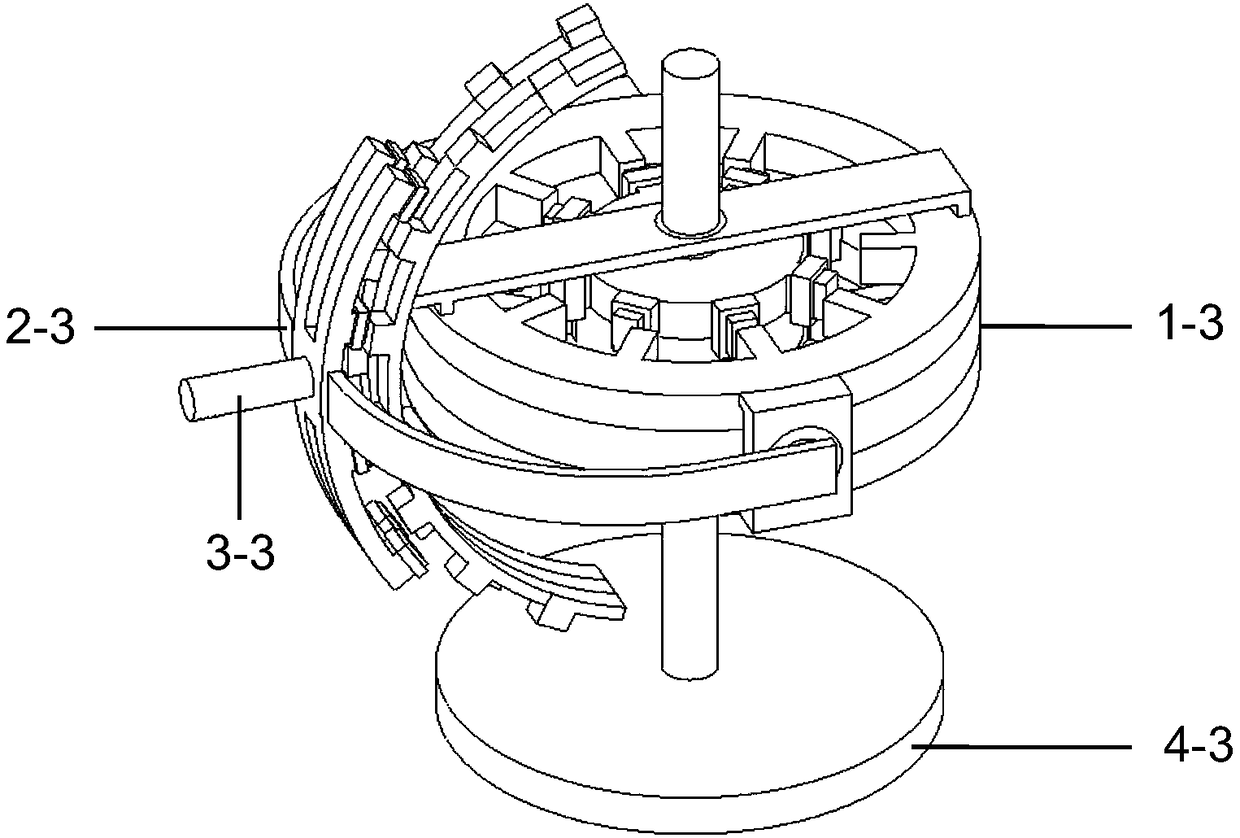
[0055] Two-degree-of-freedom hybrid stepper motors with orthogonal cylindrical structures for robots, such as Figure 4As shown, it includes a first degree of freedom motor 1-4, a second degree of freedom motor 2-4, an output shaft 3-4 and a base 4-4, and the first degree of freedom motor 1-4 is an inner rotor motor, including a rotor part, The stator part, the stator end cover 5, the rotating shaft 9, the second degree of freedom motor 2-4 is an outer rotor motor, including the rotor part, the stator part, and the rotor end cover 6; the rotor parts of the two degrees of freedom motors have the same structural principle, Comprising a ring-shaped permanent magnet 10 and two ring-shaped laminated rotor cores 8 on both sides, a number of small teeth are evenly arranged on the outside (first degree of freedom motor 1-4) or inside (second degree of freedom m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More