

Cucumber picking robot system and picking method in greenhouse
A picking robot and robot technology, applied in the field of intelligent robots, can solve the problems that the quality of picking operations affects the storage, processing and sales of fruits and vegetables, affects market prices and economic benefits, and the labor intensity of harvesting operations is high, so as to improve environmental adaptability and work efficiency. Efficiency, fast computing speed, and the effect of improving the quality of image acquisition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
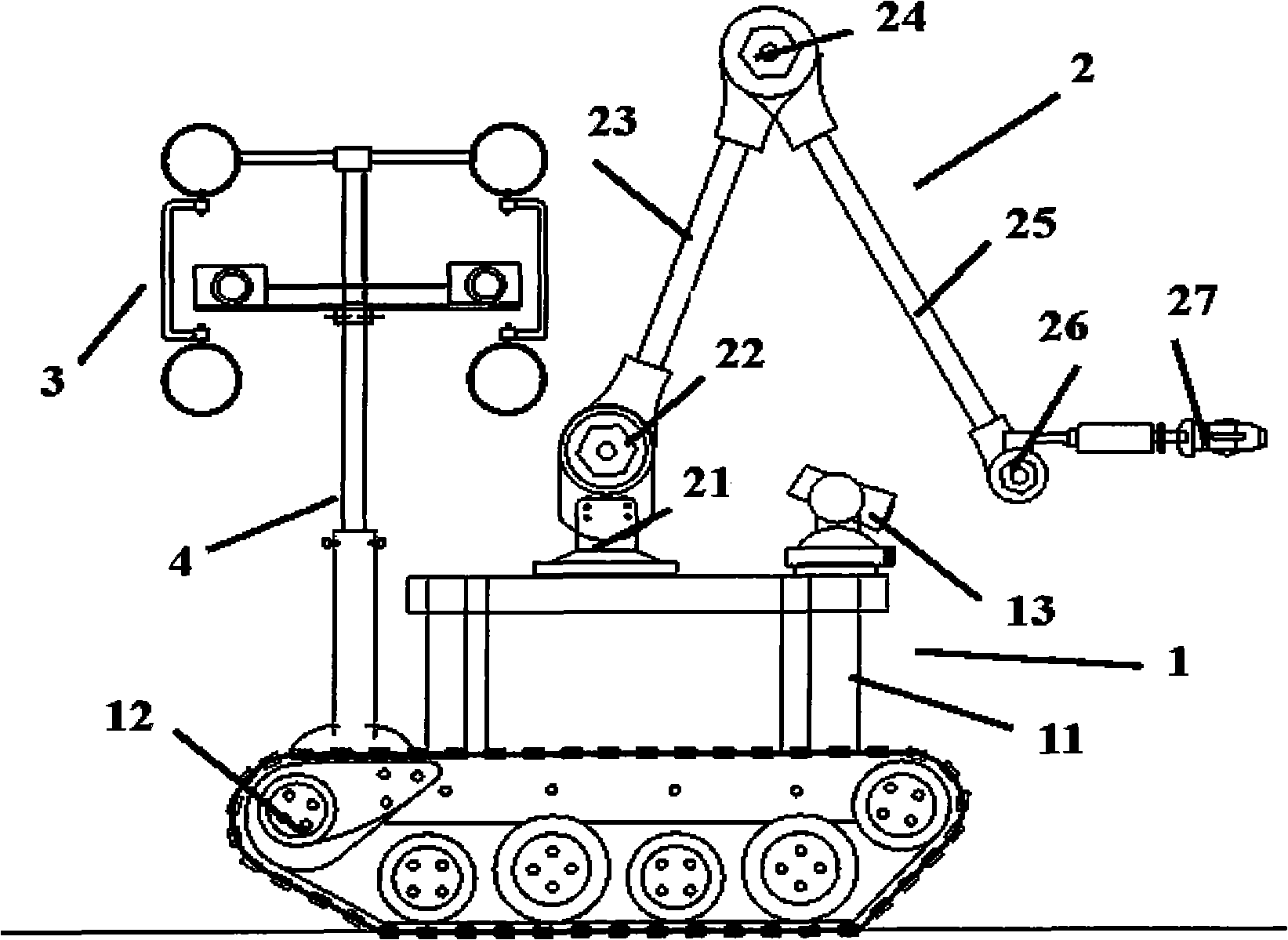
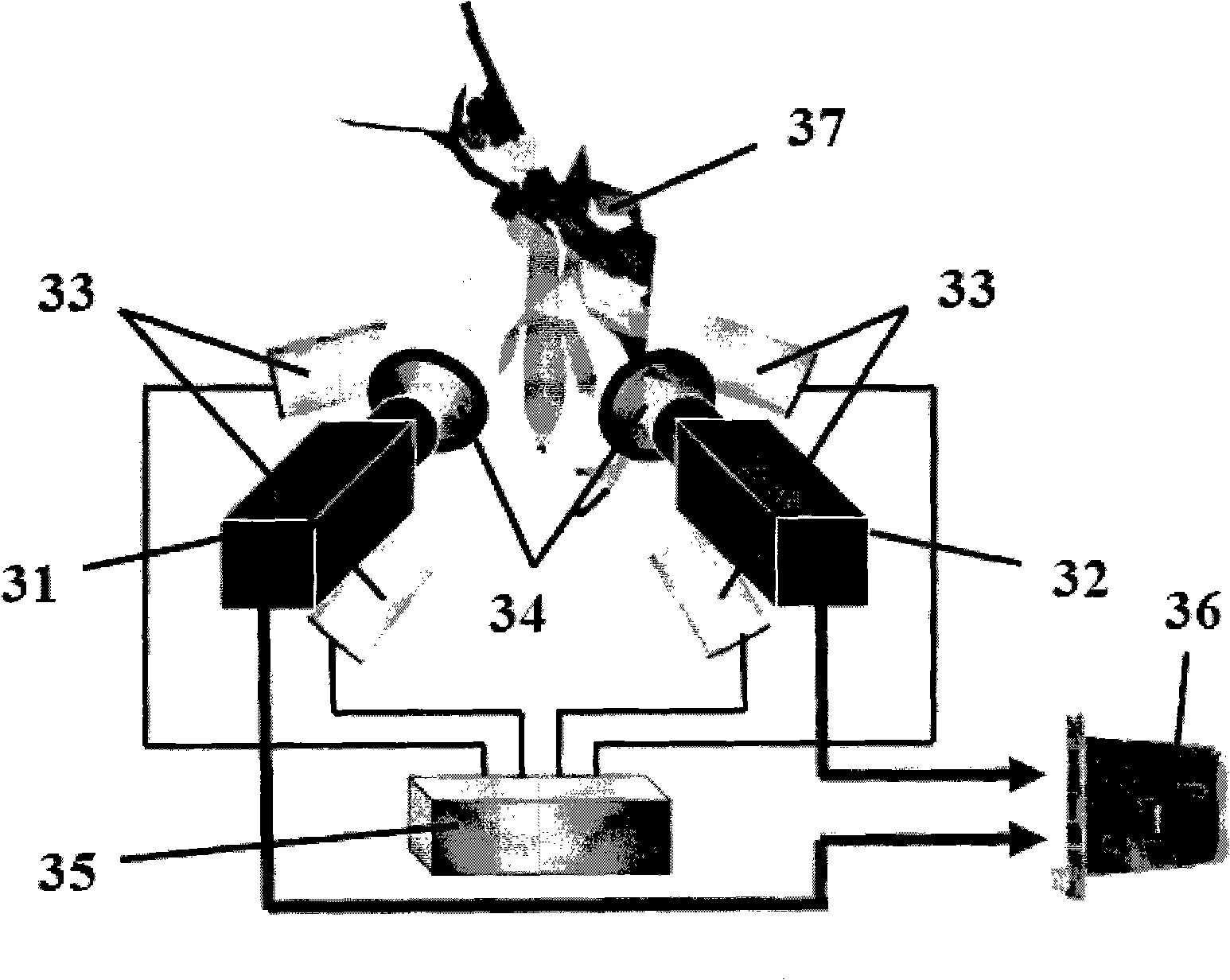
[0052] like figure 1 As shown, the cucumber picking robot system of the present invention includes a robot mobile platform 1 , a mechanical arm device 2 and a binocular stereo vision system 3 .
[0053] The mobile robot platform 1 includes a crawler car body 12, a pan-tilt camera 13, a vehicle-mounted PC processor (not shown in the figure, placed in the control center 11), a motion controller (not shown in the figure, placed in the control center 11 Inside), motor driver (not shown in the figure, placed in the crawler car body 12). The robot mobile platform adopts the motor rear wheel drive mode. After the system receives the start command sent by the binocular stereo vi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More