

Driving assistance information display method based on dynamic probability driving map
A technology for driving assistance and information display, which is used in the generation of 2D images, combustion engines, and image data processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0068] Specific implementation mode 1. Combination Figure 1 to Figure 17 Describe this embodiment, a method for displaying driving assistance information based on a dynamic probabilistic driving map, which is implemented by the following steps:
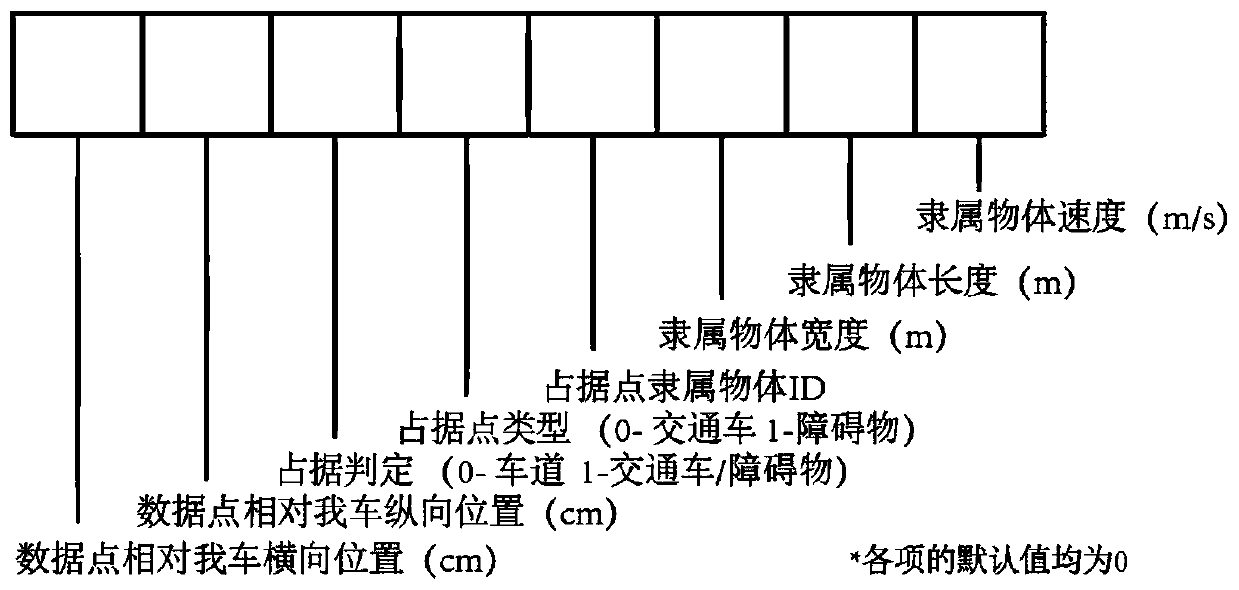
[0069] Step 1. Generate an initial static grid map: use the camera and inertial navigation device to obtain lane line information by building a lane line model; use laser radar to obtain obstacle information and fill it into the grid map.
[0070] The method of generating the initial static grid map is as follows:
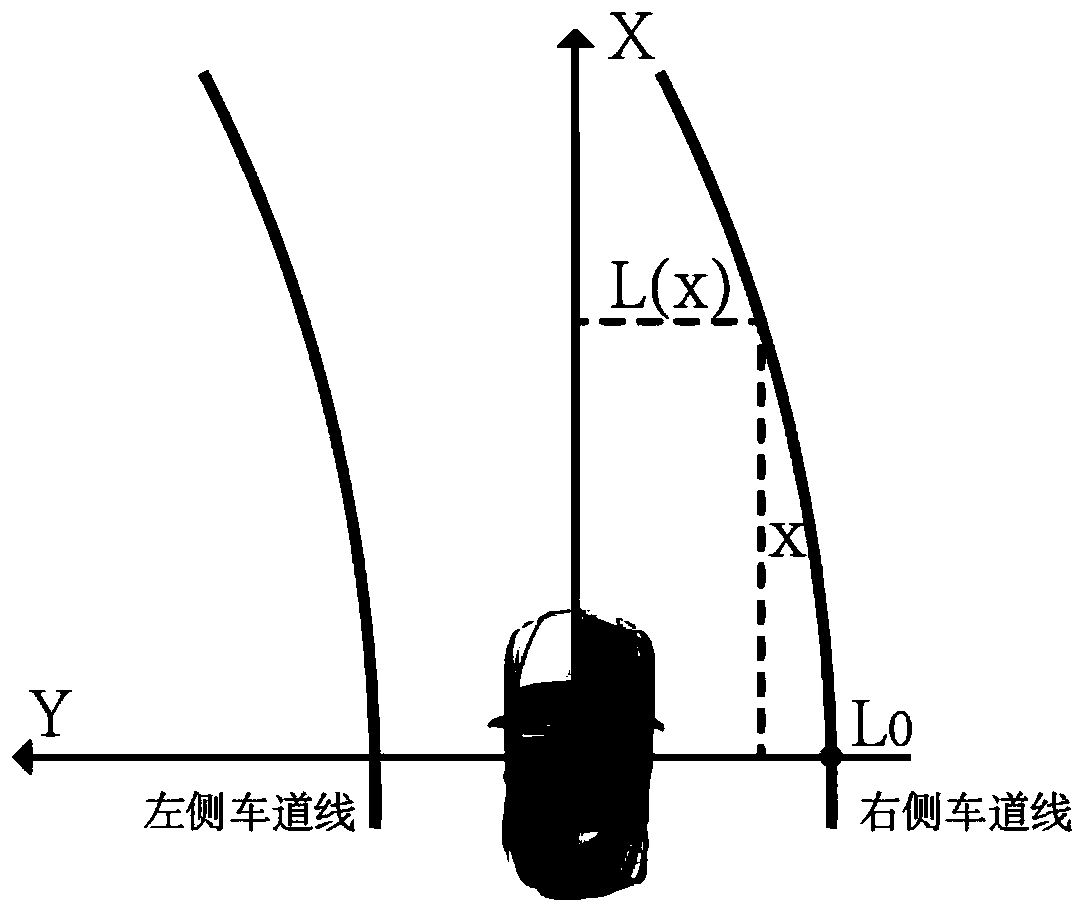
[0071] Step 11, establishing a lane line model and obtaining lane line information;
[0072] Use the on-board smart camera for lane mark detection and lane tracking to realize the grid division of the surrounding environment of the vehicle and vehicle positioning and other functions.
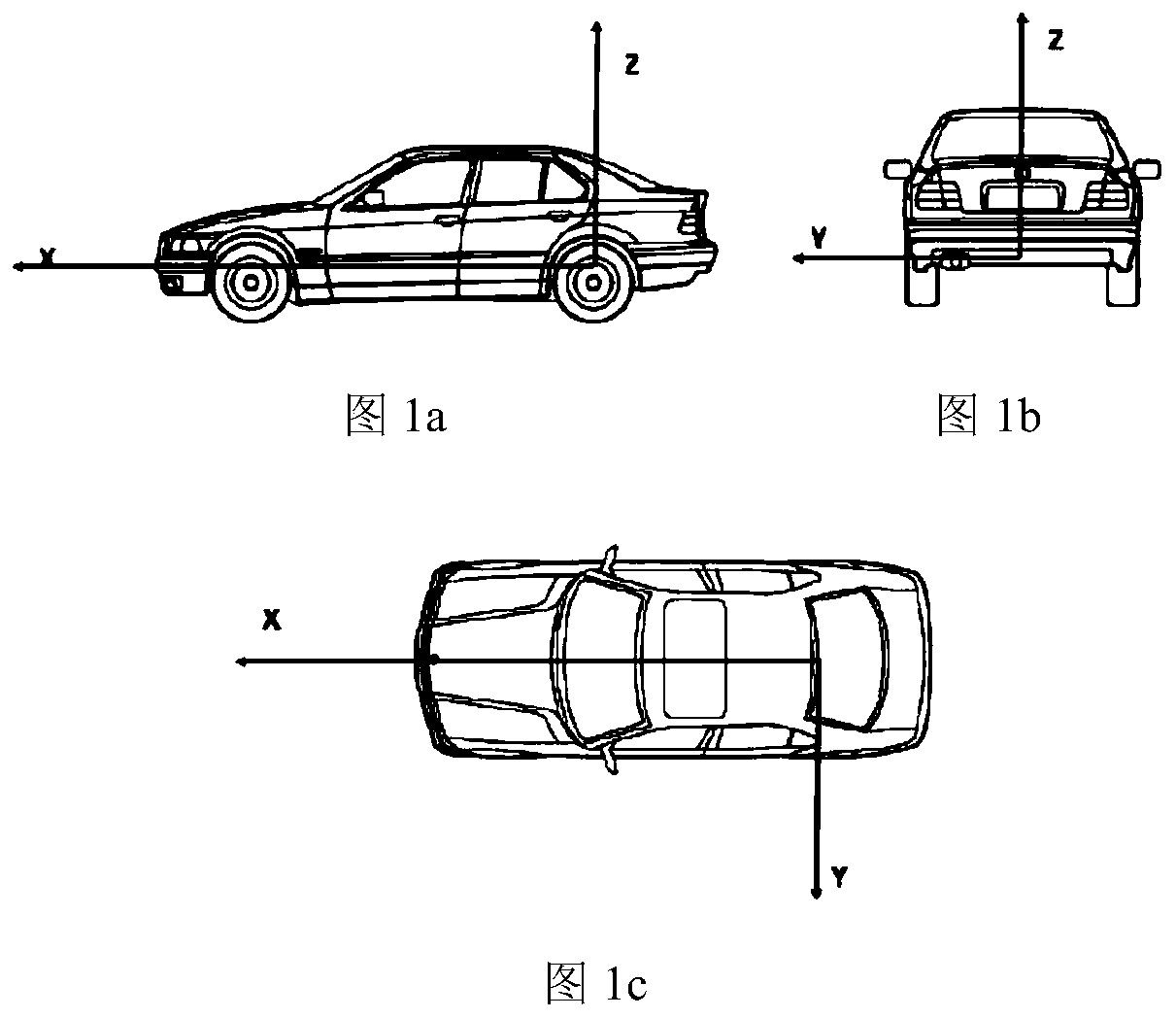
[0073] Based on the vehicle coordinate system, such as figure 1 shown. Assume that the four-lane boundary recognized by the smart came...
specific Embodiment approach 2
[0171] Specific embodiment two, combine Figure 1 to Figure 17 Describe this embodiment. This embodiment is a driving assistance information system supported by a dynamic probabilistic driving map based on the driving assistance information display method based on a dynamic probabilistic driving map described in Embodiment 1;
[0172] Firstly, the spatial position information and motion information of the vehicle are obtained through the vehicle sensors such as inertial navigation and GPS, and the obstacle / vehicle occupancy information and lane line information of the vehicle's current environment are obtained through the vehicle's laser radar and vision device. .
[0173] Then, the above sensor data information is transmitted to the DPDM generation module in the assisted driving system, and the sensor feature level data is deconstructed and analyzed, and the DPDM that conforms to the current state of the vehicle is generated hierarchically.
[0174] Secondly, the updated DPD...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More