

Assistance mechanical arm structure based on truss robot
A technology of a truss robot and a mechanical arm, applied in the field of truss robots, can solve problems such as the inability of the Z-axis arm to bypass and operate, and achieve the effect of improving practicability, applicability and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
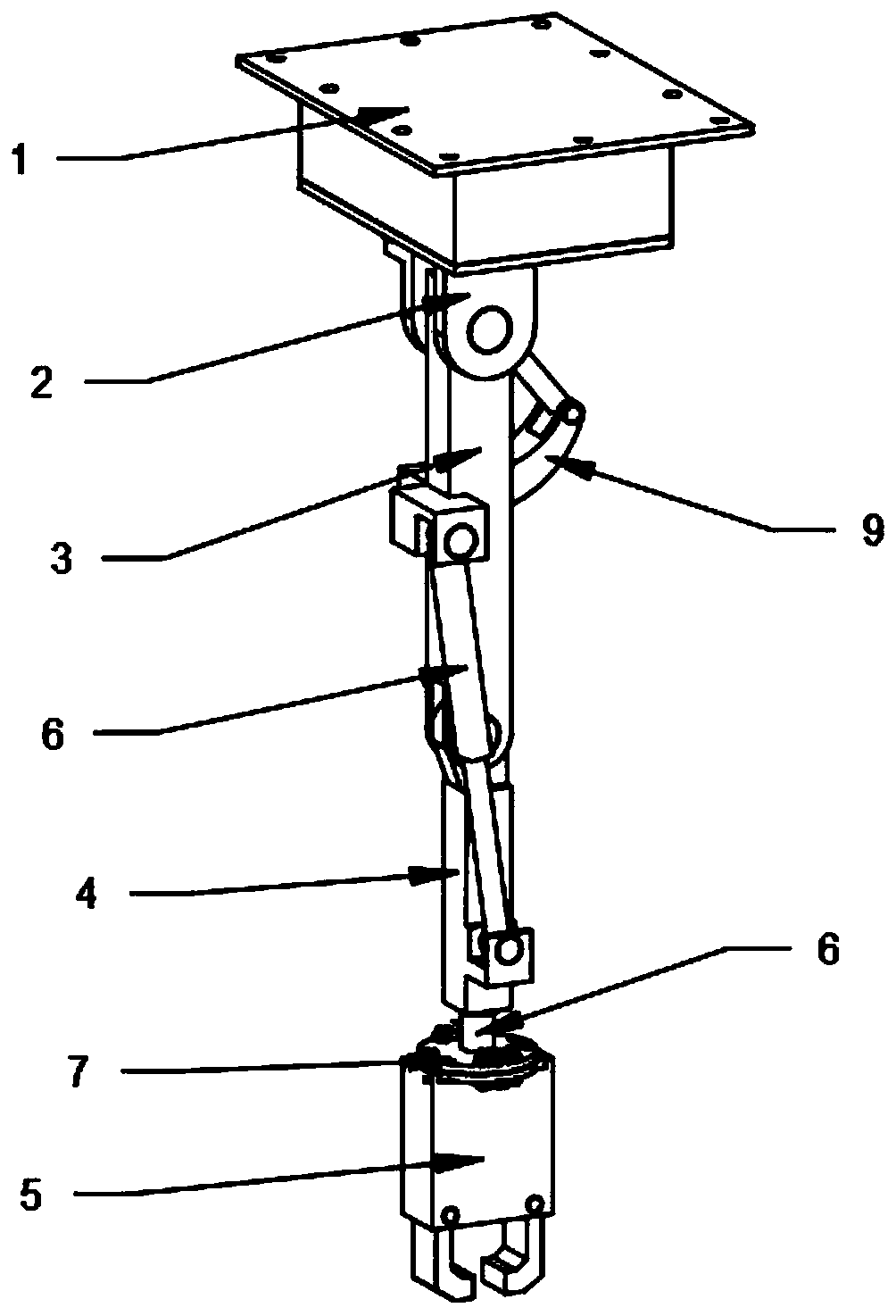
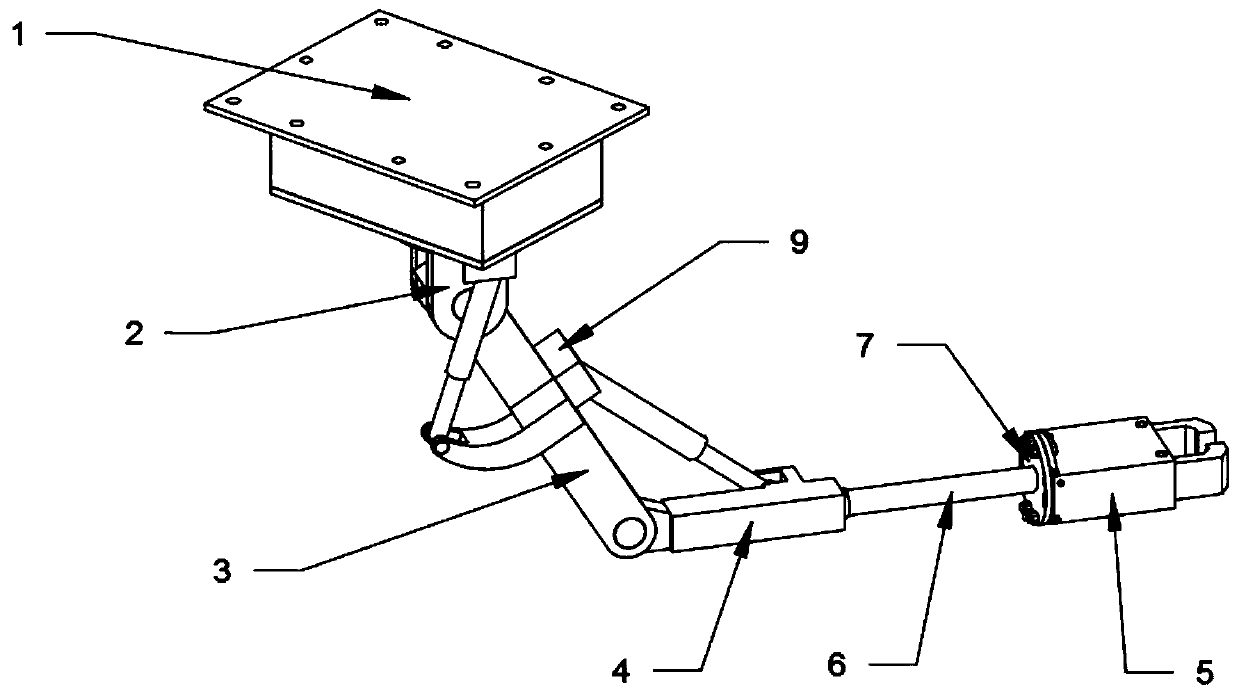
[0026] as attached figure 1 to attach Figure 4 Shown:
[0027] The present invention provides a power-assisted mechanical arm structure based on a truss robot, including a connecting seat 1, a turntable 2, a longitudinal arm 3, a cross arm 4, a gripper device 5, an electric push rod 6, a connecting plate 7, a reduction motor 8 and a connecting block 9. The inside of the connection seat 1 is provided with a rectangular installation body, and the installation body is provided with a motor installation slot and a turntable 2 installation slot, and the connection seat 1 is screwed to the Z-axis arm of the truss robot through the reserved screw hole on the top. One end of the turntable 2; the turntable 2 is fixedly connected in the installation groove of the turntable 2 inside the connecting seat 1, and a square connecting block 9 is provided on one side of the turntable 2; the longitudinal arm 3 is movably connected to the top of the turntable 2 through a connecting rod In the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More