

Membrane computing-based mobile robot obstacle avoidance control method
A technology of mobile robot and control method, which is applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve the problems of low calculation efficiency and large time consumption, and achieve saving calculation time and improving Obstacle avoidance effect, effect of improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0057] from Figure 5 , 6 It can be seen from the experimental results that compared with the fixed cruising speed obstacle avoidance control method, the obstacle avoidance control method of the present invention can avoid obstacles better.
Embodiment 2
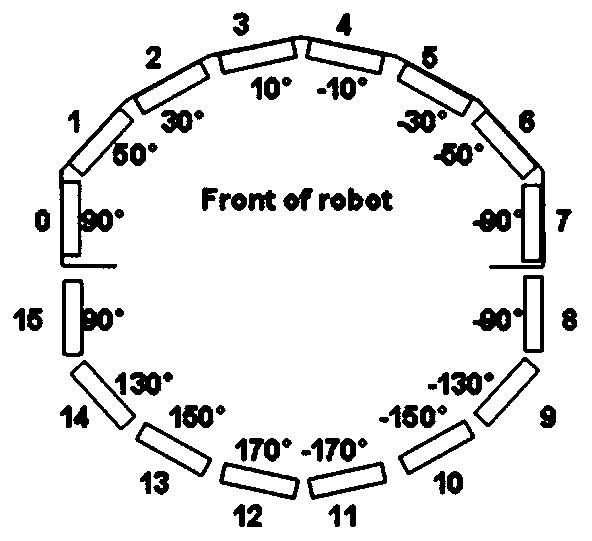
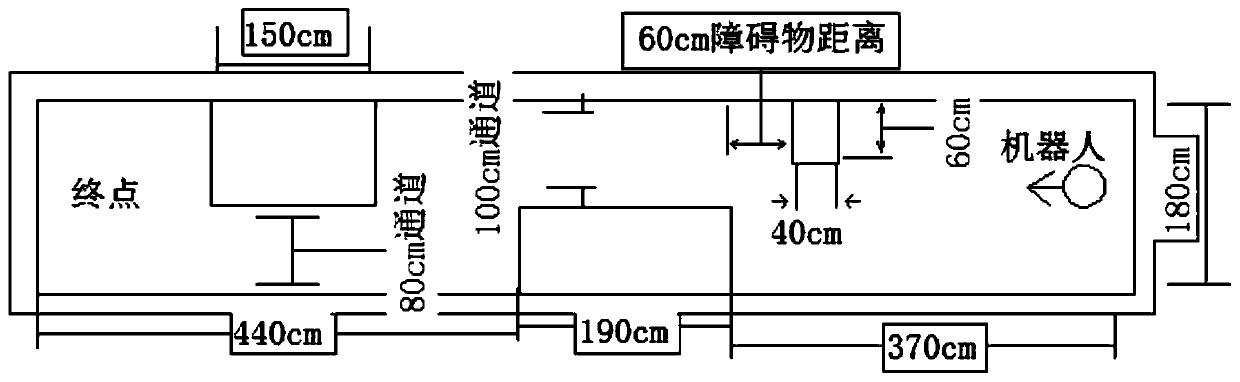
[0059] The present invention is simulated on a PC. The computer used in the simulation experiment is Lenovo G470 2.3GHz, 6GRAM, the operating system is Window7, the simulation platform is MobileSim, the simulation robot is Pioneer3-DX, and the size of the robot is 52*40cm. The simulated robot is equipped with 16 sonar sensors, which are distributed as figure 1 . Simulation environment such as figure 2 As shown, the environment includes a 100cm channel, an 80cm channel, two obstacles at a distance of 60cm, etc.
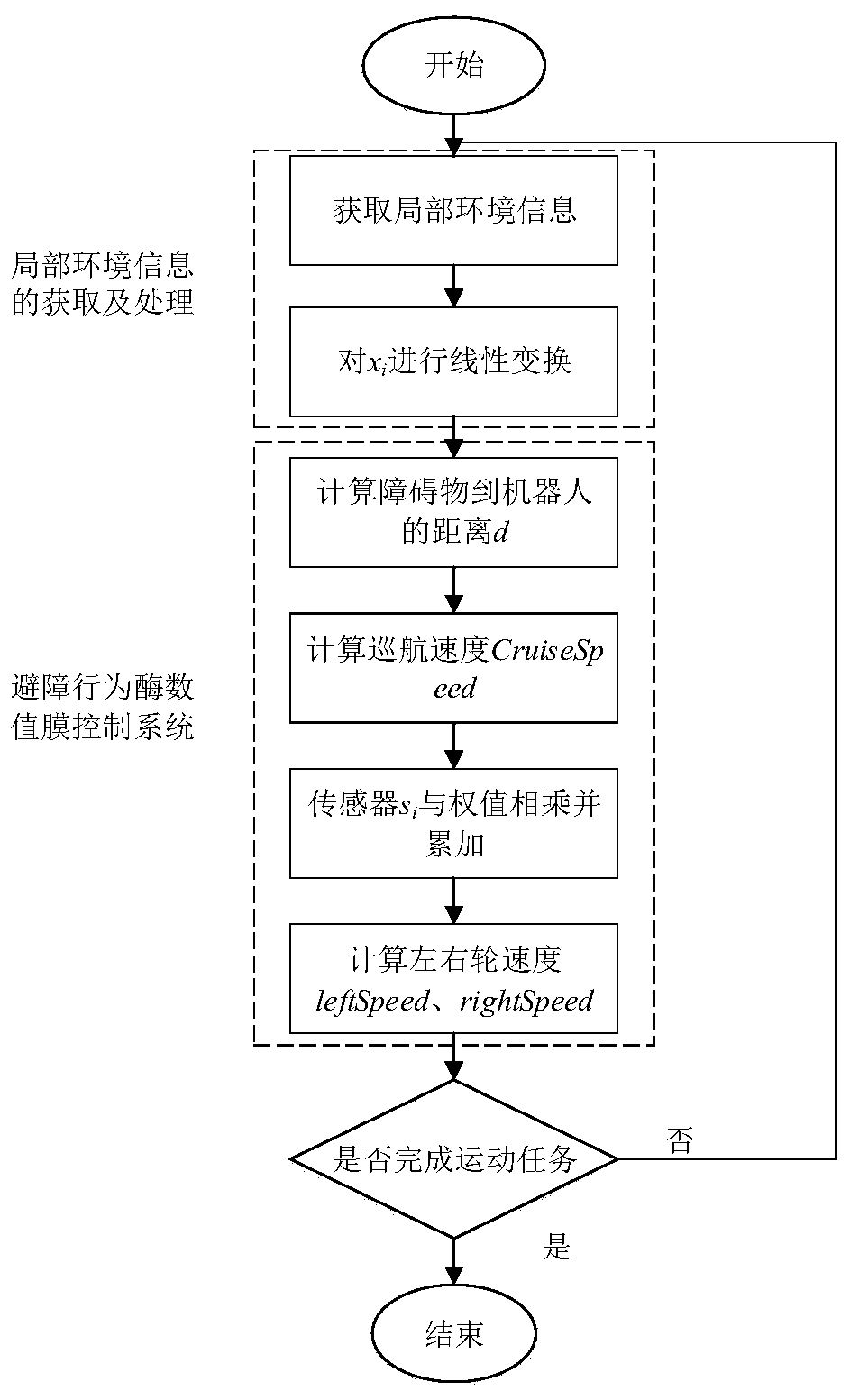
[0060] To sum up, the obstacle avoidance control method of a mobile robot based on membrane computing, when used, first obtains the local environment information as an input, then uses the n distance sensors around the mobile robot to obtain the distance between the obstacle and the corresponding sensor Value xi, and perform linear transformation on xi, then calculate the distance from the obstacle to the robot, and calculate the cruising speed, then multiply the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More