An Adaptive Obstacle Avoidance Control System for Intelligent Driving Vehicles
A technology for intelligent driving and control systems, applied in control devices, vehicle components, steering mechanisms, etc., to achieve high calculation accuracy, simple design methods, and improved safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0046] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
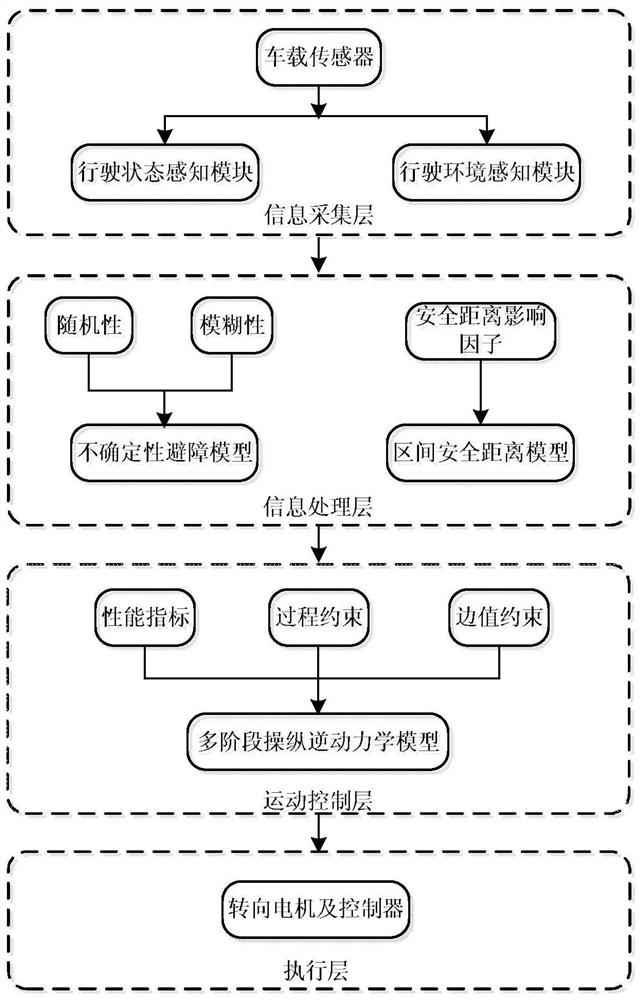
[0047] like figure 1As shown, the present invention designs an adaptive obstacle avoidance control system for an intelligent driving car, including an information collection layer, an information processing layer, a motion control layer, and an execution layer; the information collection layer includes a vehicle driving state perception module and a vehicle driving environment The perception module is used to collect vehicle driving state information and vehicle driving environment information and transmit them to the information processing layer, the vehicle driving state information includes vehicle speed information, and the vehicle driving environment information includes surrounding obstacle information; the information processing layer Including an uncertain obstacle avoidance model and an interval safety distance model, the uncertain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More