

Cooperative motion method for robot cluster in obstacle scene
A collaborative motion and robot technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as incomplete application, complex problems, robot cluster movement, etc., to reduce coupling and facilitate algorithms The effect of design and expansion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The accompanying drawings are for illustrative purposes only, and should not be construed as limiting the present invention; in order to better illustrate this embodiment, certain components in the accompanying drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art It is understandable that some well-known structures and descriptions thereof may be omitted in the drawings. The positional relationship described in the drawings is for illustrative purposes only, and should not be construed as limiting the present invention.
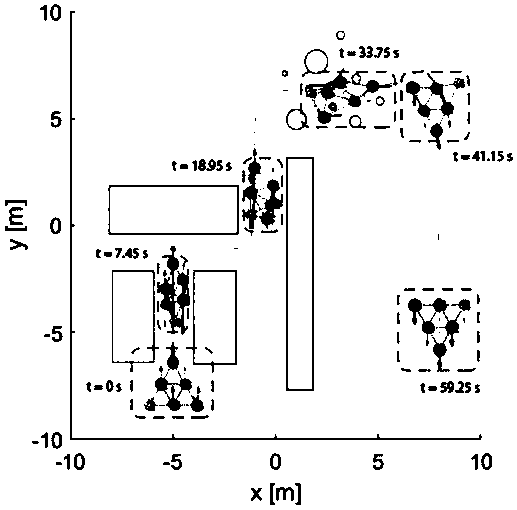
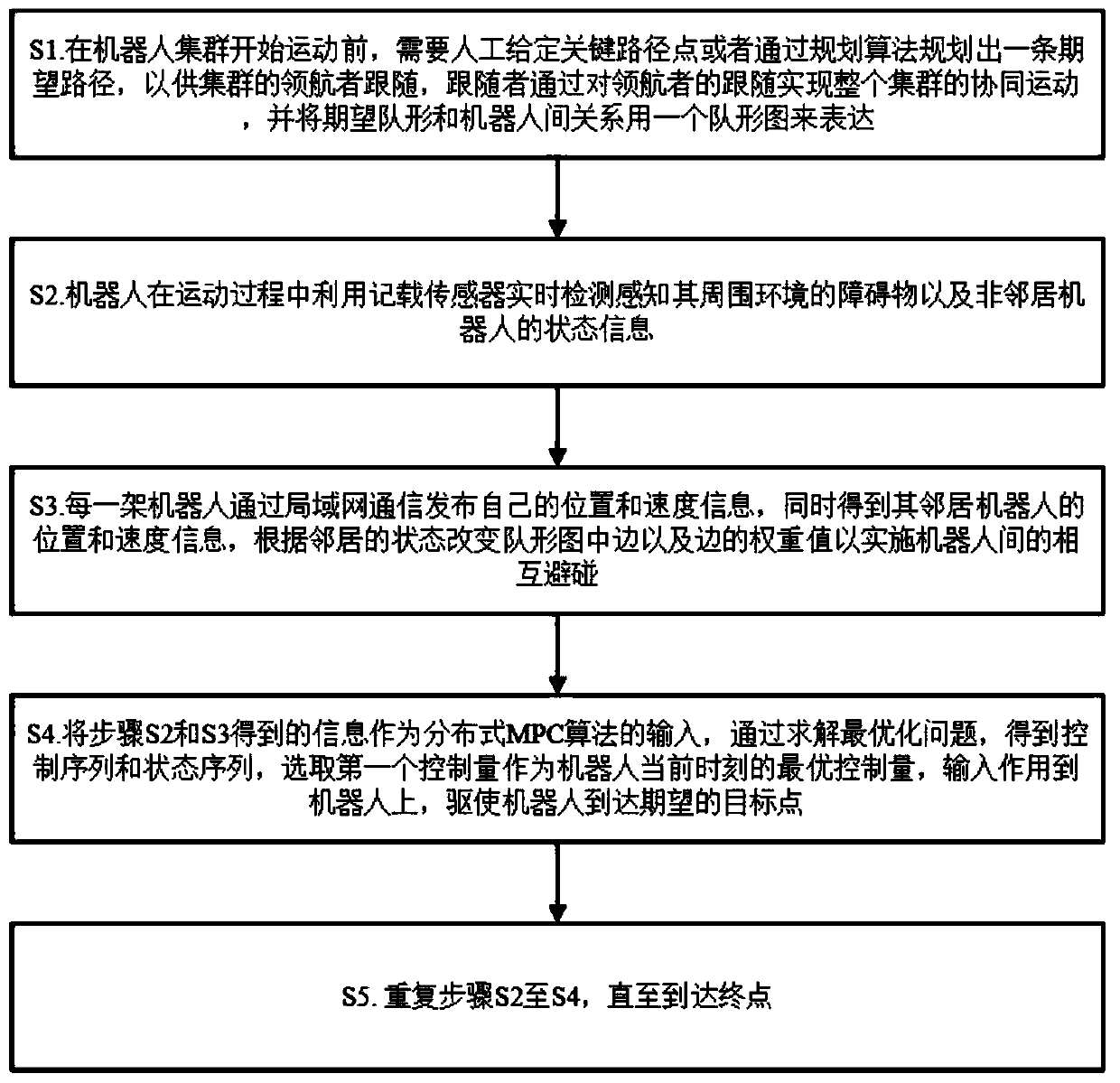
[0049] Such as figure 1 As shown, a collaborative movement method of swarm robots in complex scenes includes the following steps:
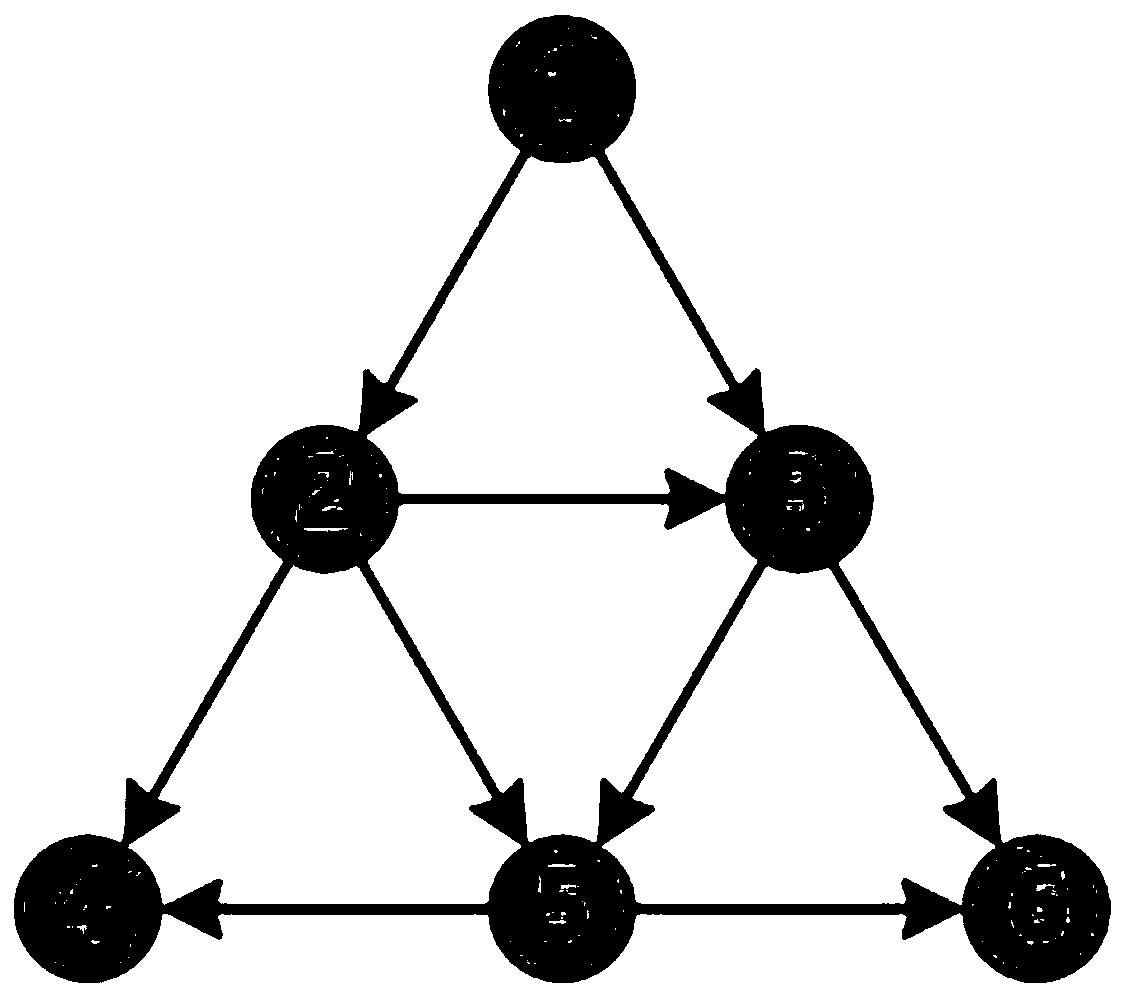
[0050] Step 1. Before the robot cluster starts to move, it is necessary to manually set the key path point or plan an expected path through the planning algorithm for the leader of the cluster to follow. The follower realizes the coordinated movem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More