

Virtual reality device and posture perception and tactile reproduction control method
A technology of virtual reality and control method, applied in the field of virtual reality, can solve the problems of poor tactile experience, poor measurement accuracy and real-time performance, and achieve the effect of good real-time performance, high spatial measurement accuracy, and enhanced haptic feedback
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
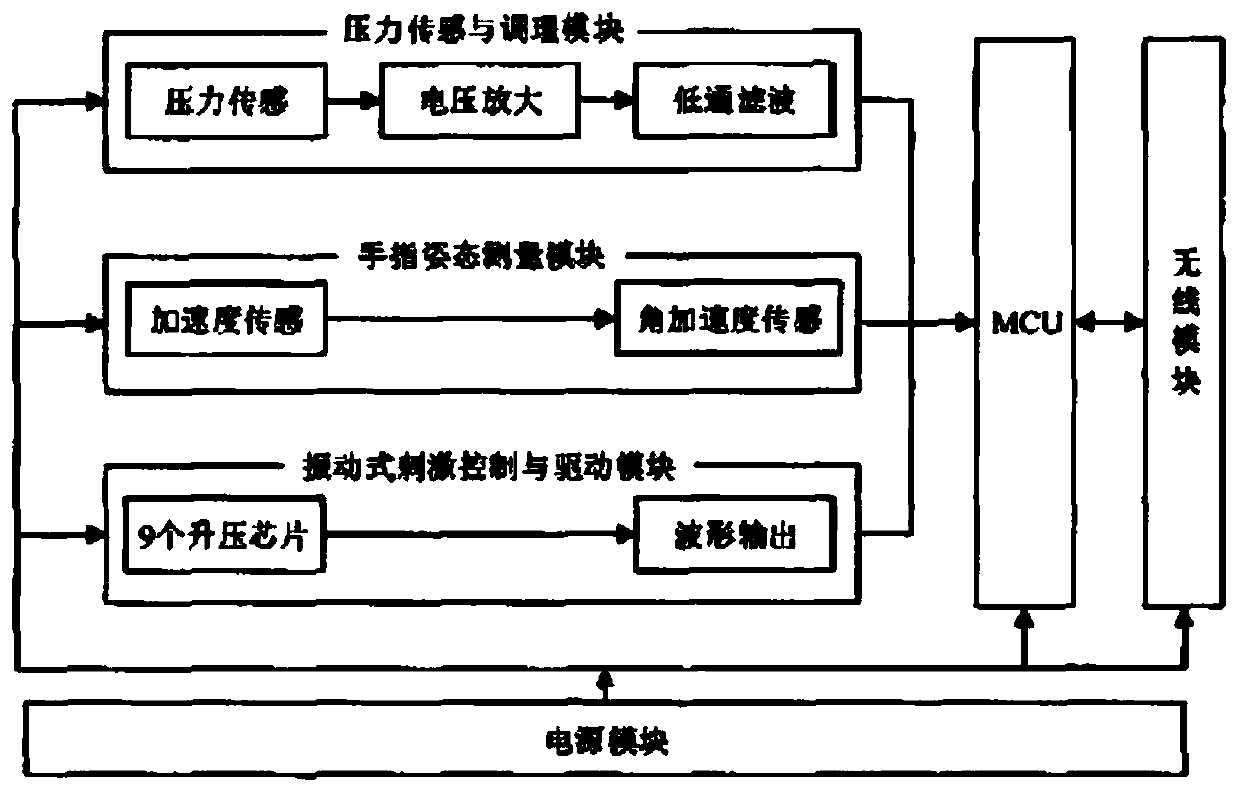
[0023] Such as Figure 1 to Figure 3 As shown, a virtual reality device is provided in this embodiment, including gloves that can be worn by the user, and the gloves are equipped with:
[0024] Pressure sensing and conditioning module, including the pressure sensor used to detect the force of each finger, the electrical signal is output after voltage amplification and low-pass filtering;
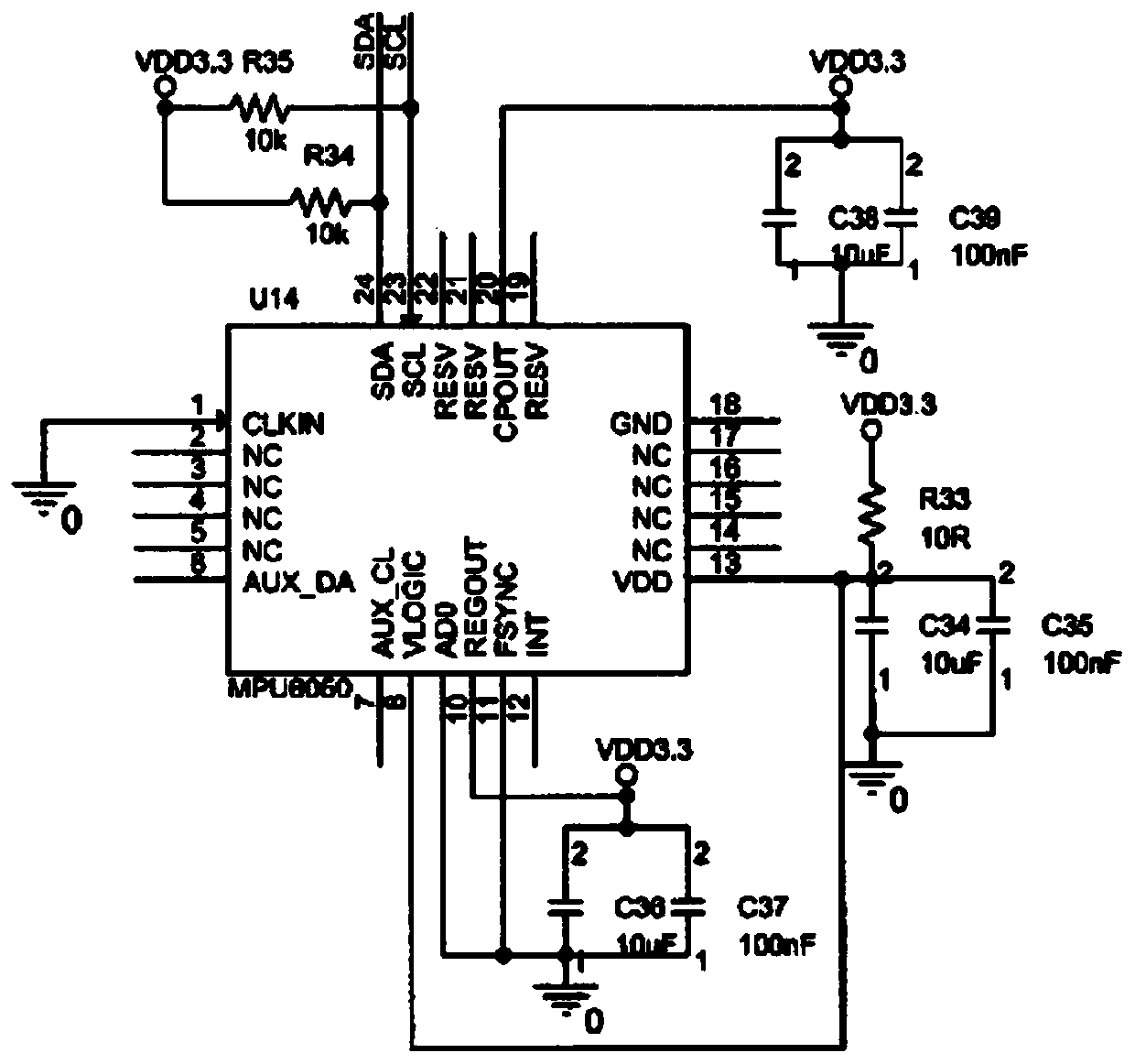
[0025] A miniature electronic gyroscope is used to collect the acceleration signal and angular velocity signal of the glove;
[0026] Vibration stimulus control and drive module, used to generate vibrotactile sensation;
[0027] Single-chip microcomputer (principle such as image 3 shown), calculate the position and attitude of the glove according to the acceleration signal and angular velocity signal of the glove, and output commands to control the vibration stimulation control and drive module.
[0028] The virtual reality device in this embodiment detects the acceleration signal and an...
Embodiment 2
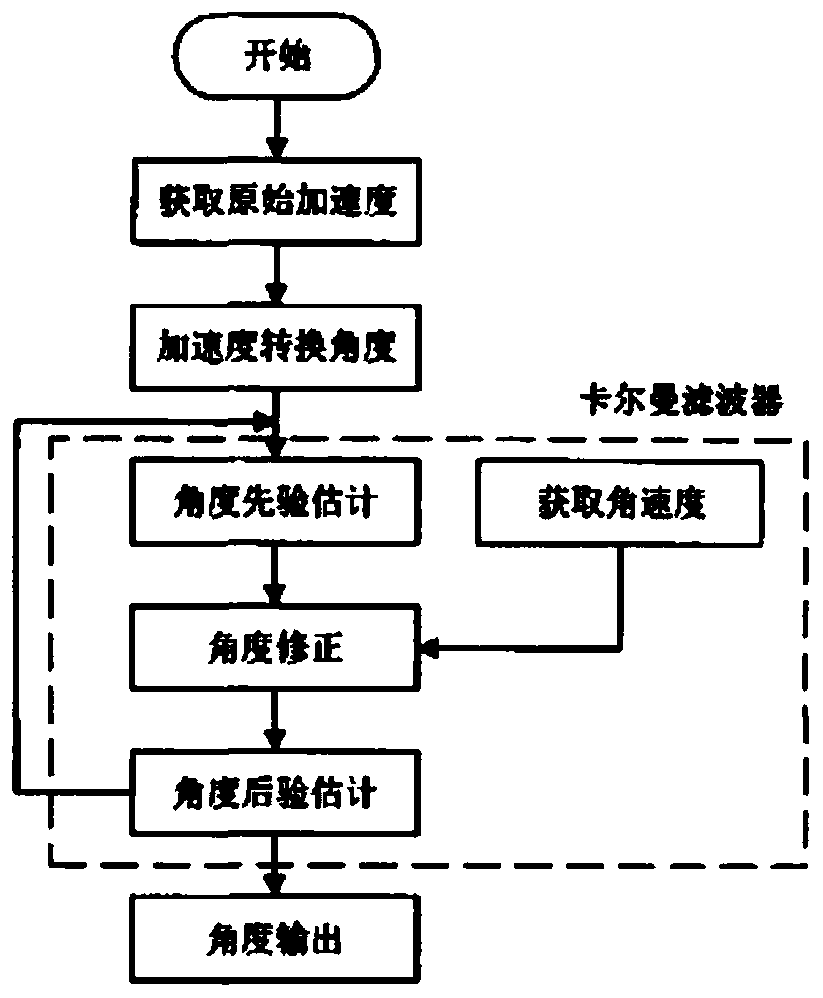
[0034] Such as Figure 1 to Figure 4 As shown, the gesture perception and tactile reproduction control method is provided in this embodiment, including the following steps;
[0035] Acquire raw acceleration: Perceive the three-axis angular velocity and three-axis velocity of the glove worn by the user, specifically using a miniature electronic gyroscope.
[0036] Kalman fusion filtering: through Kalman fusion filtering algorithm, the three-axis angular velocity and three-axis acceleration are fused to output the real-time position and attitude of the glove;
[0037] Determine whether the finger has caught the object;
[0038] If an object is caught, detect the shape information of the object;
[0039] Controls the amplitude and frequency of the vibrating stimulation module in contact with the user's finger, simulating the perception of touch.
[0040] The posture perception and tactile reproduction control method in the embodiment detects the acceleration signal and angular...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More