

Map-assisted inertial pre-integral pedestrian navigation method
A pedestrian navigation and pre-integration technology, applied in the field of inertial pre-integration pedestrian navigation, can solve problems such as poor correction effect, decreased accuracy, and inability to reflect the real situation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0080] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
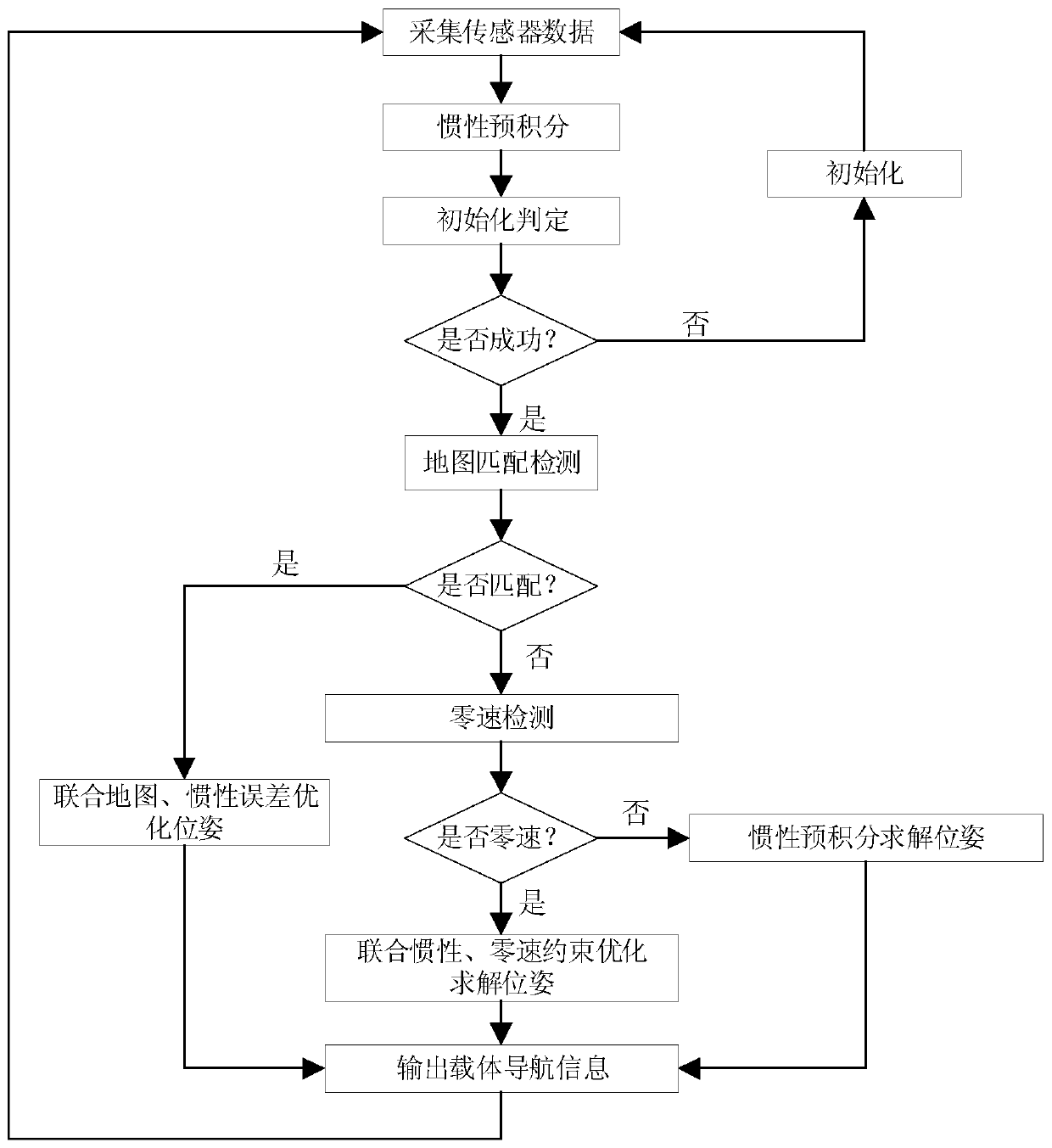
[0081] The present invention designs a map-assisted inertial pre-integration pedestrian navigation method, such as figure 1 As shown, the inertial sensor is fixed on the pedestrian foot carrier, and the inertial sensor includes a gyroscope and an accelerometer. It is characterized in that the steps are as follows:
[0082] Step 1: Periodically collect accelerometer data and gyroscope data at time k;
[0083] Step 2: Use the inertial sensor measurement data obtained in step 1 to pre-integrate and predict the navigation information of the carrier at time k, and obtain the pre-integrated predicted value;
[0084] Step 3: Determine whether the navigation system is initialized. If not, initialize it to obtain the bias of the inertial sensor and the estimated value of the gravity component, and jump to step 1; if it has been initialized, go to s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More