Target detection method in mining truck environment based on improved tiny-yolov3
A target detection and truck technology, which is applied in the direction of instruments, biological neural network models, character and pattern recognition, etc., can solve the problems of reducing the depth of the convolutional layer, increasing the running speed, and unsatisfactory real-time performance, so as to improve the accuracy of network detection, The effect of loss reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0046] like figure 1 Shown: A target detection method based on the improved tiny-yolov3 mining truck environment, including the following steps:
[0047] S1. Acquiring target image data.
[0048] The target object image data described here are pictures of people and vehicles taken by the camera on the truck from a bird's-eye view.
[0049] S2. Preprocessing the acquired image data of the target object.
[0050] It should be noted that the preprocessing described here at least includes data enhancement on the acquired image data of the target object and calculation of the size of anchors suitable for the dataset of the tiny-yolov3 model in step S3 by using the k-means clustering algorithm.
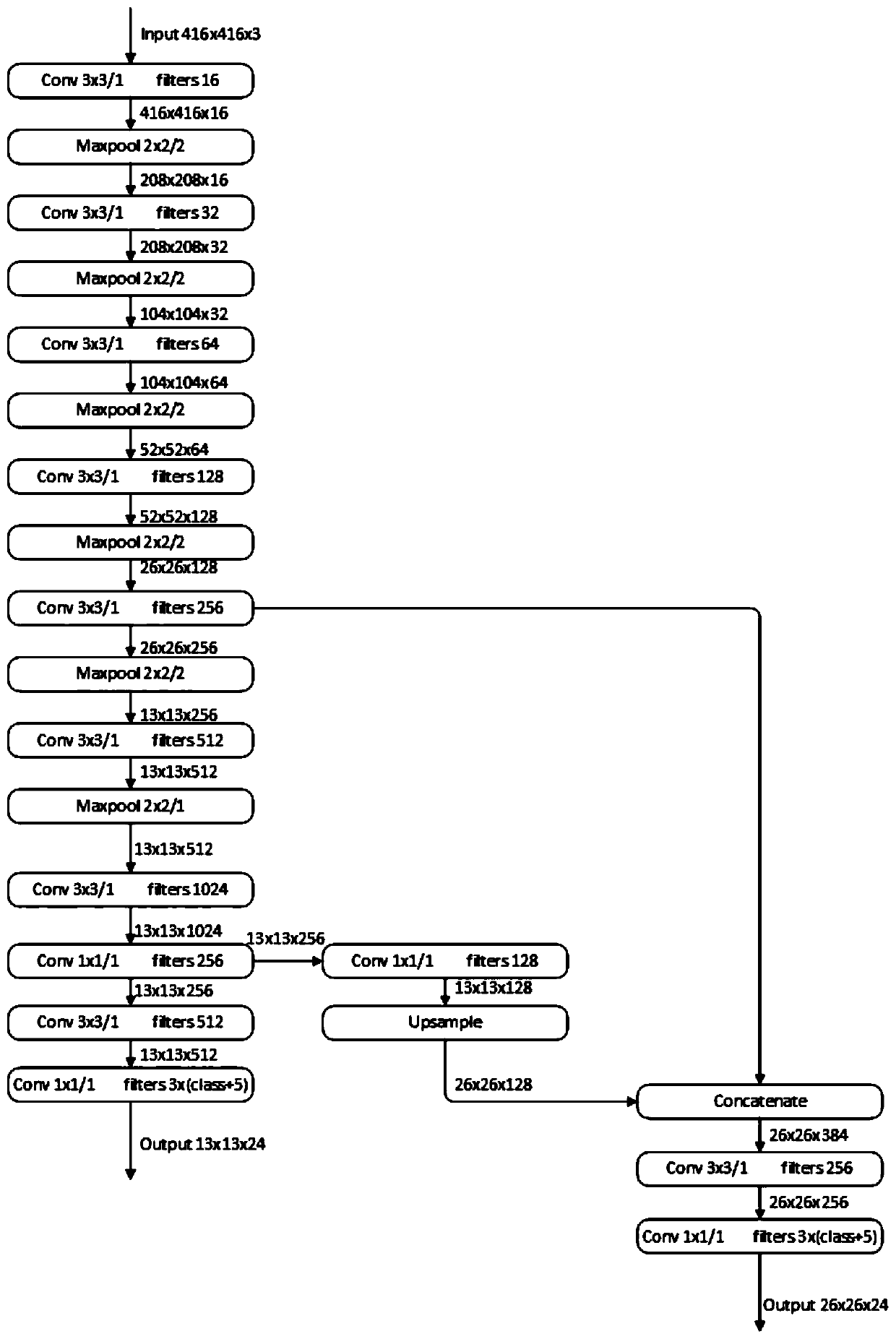
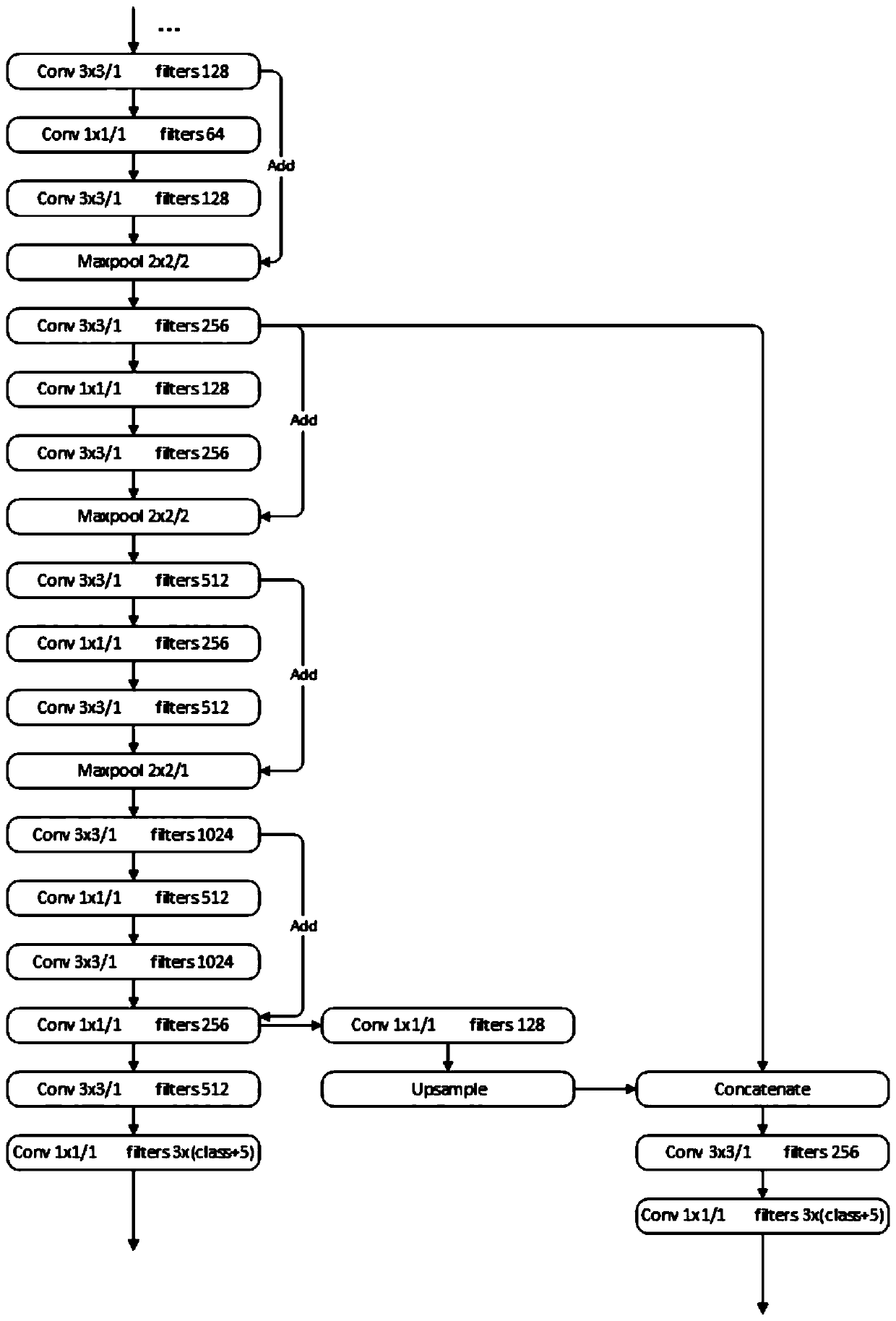
[0051] S3. Input the preprocessed object image data into the tiny-yolov3 model, and obtain the pixel position coordinates of the object in the image through the processing of the tiny-yolov3 model.
[0052] Wherein, the tiny-yolov3 model is an improved model combined with a residual netw...
Embodiment 2
[0076] The data set used in this embodiment consists of: extracting two types of people and cars in VOC2007 and VOC2012, and randomly selecting 50% of each as a part of the data set; pictures of people and cars taken by a camera at a bird’s-eye view; Pictures of mining trucks, people and vehicles taken at the scene. Among them, it is necessary to do data enhancement on the pictures containing mining trucks to expand the number of training for such targets as mining trucks.
[0077] The hardware configuration used in the experiment in this embodiment is a computer with Intel Core i5-7500 3.40GHz processor, NVIDIA GTX 1050Ti graphics card, 16GB RAM, 500GB Western Digital mechanical hard disk, the system is Windows10, 64-bit system, the programming language is Python, GPU acceleration Adopt CUDA9.0 and CUDNN7.0 to realize.
[0078] The training method used in this embodiment is: randomly select 90% of the pictures in the above data set as the training set, and the remaining 10% ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More