Robot tail end force doubling pneumatic scissor hand
A robot and scissor hand technology, which is applied to the field of double force pneumatic scissors at the end of the robot, can solve the problems of multiple shearing, insufficient shearing force, and matching of tooling frames, so as to facilitate shearing, solve insufficient air pressure, and ensure shearing. force effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described now in conjunction with accompanying drawing. These drawings are simplified schematic diagrams only to illustrate the basic structure of the present invention in a schematic way, so they only show the components relevant to the present invention.
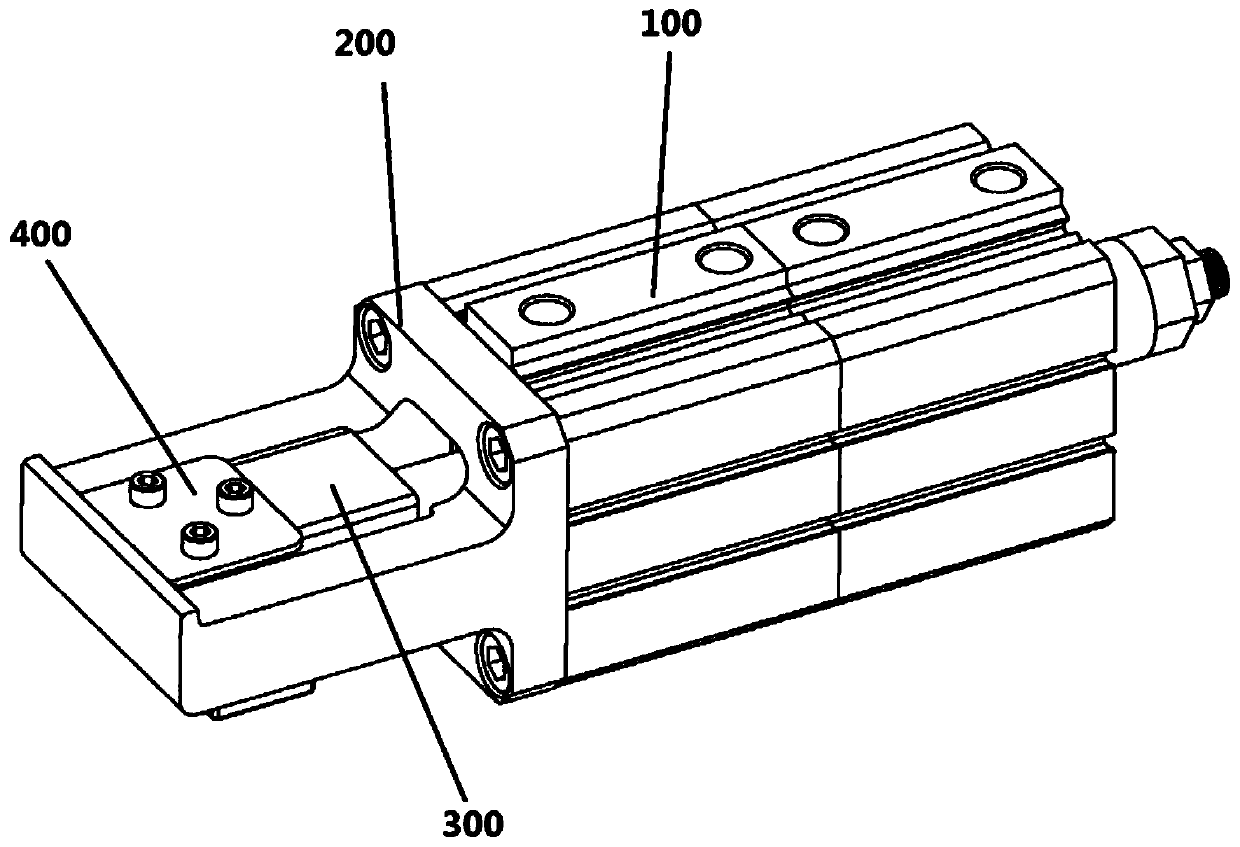
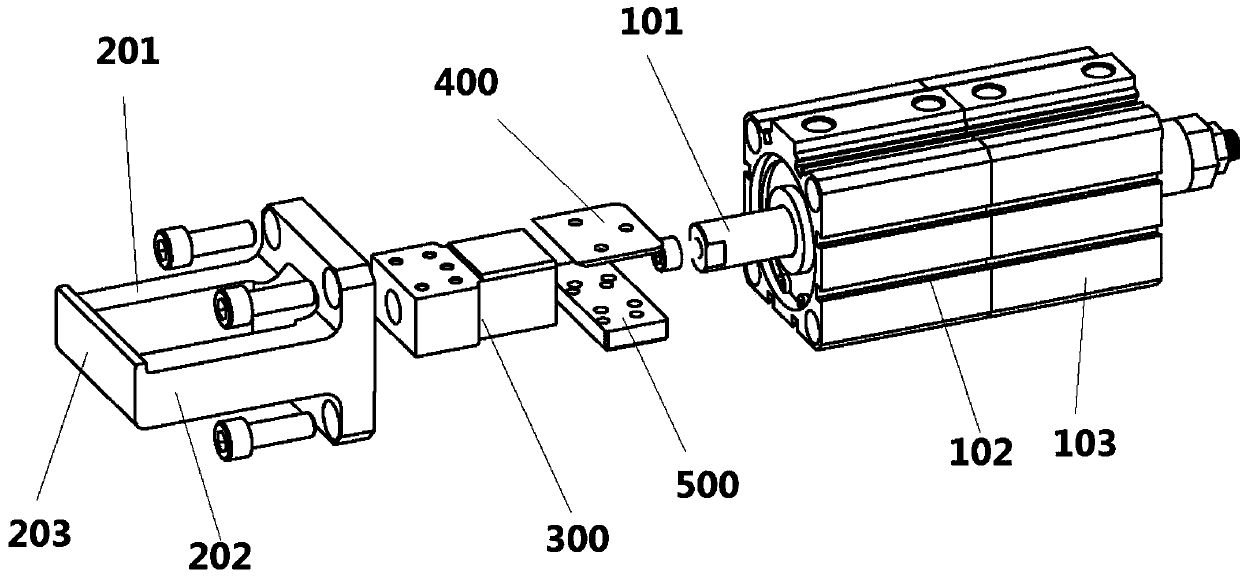
[0014] like Figure 1-Figure 2 As shown, the present invention provides the following technical solutions:
[0015] A kind of robot terminal multi-force pneumatic scissors hand, including a cylinder 100, a base 200 installed on the cylinder, a shearing knife seat 300 and a shearing blade 400 installed on the base, the shearing blade 400 is detachably installed on the shearing knife On the seat 300, the shearing knife seat 300 is connected with the cylinder piston rod 101, and the two ends of the bottom of the base 200 protrude upward to form two supporting columns 201 and 202 parallel to each other, and the front ends of the supporting columns 201 and 202 are provided with a bl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com